旋转传感器
库:
万博1manbetx仿真软件编万博1manbetx码器支持包烦恼EDR版本5的机器人的大脑/传感器
描述
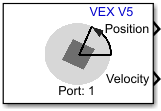
的旋转传感器块读取轴旋转的位置和速度传感器连接到烦恼®V5的大脑。烦恼V5旋转传感器是一个绝对编码器,它保留了在动力循环轴取向。
港口
输出
参数
聪明的港口- - - - - -聪明的烦恼V5旋转传感器连接端口
1(默认)|1来21
选择智能港口的V5机器人烦恼V5旋转传感器连接。有21个智能港口V5机器人。
复位模式- - - - - -选择重置旋转传感器读数
没有复位(默认)|每个样品时间重置|由外部复位信号
指定的选项重置旋转传感器读数。
没有复位——块不重置旋转传感器读取和输出的总角度旋转。例如,在T = 1表中旋转传感器在逆时针方向旋转20度,所以,输出是20。
在每个样本时间重置——为每个样本期间,块输出旋转传感器读数,然后重置为0。例如,在表中,在T = 1,旋转传感器在逆时针方向旋转20度,因此,输出是20。
在T = 1和T = 2,旋转传感器在逆时针方向旋转10度,因此,输出是10。
如果你重置以这种方式旋转传感器,它保留了抵消当前程序执行。它可能需要一个复位后重新启动程序。如果你想保持零炮检距,选择设置为零在烦恼V5大脑的用户界面。有关更多信息,请参见使用烦恼V5旋转传感器。
由外部复位信号——旋转传感器读数根据输入值重置为0Rst端口。当你发送块输入的值而不是0,旋转传感器读复位为0。对于每个样本期间,块输出旋转传感器读自上一次重置。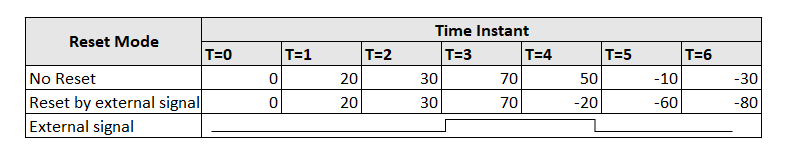

样品时间- - - - - -间隔从传感器读取的值
0.2(默认)积极标量| |1
指定样品时间以秒为单位来确定块从传感器读取的值。当你指定这个参数1,仿万博1manbetx真软件®确定最佳样本块基于块的背景模型。
版本历史
介绍了R2021b