模拟稳定援助算法使用露台模拟器烦恼V5机器人
这个例子展示了如何在仿真软件模型机器人的控制算法®使用露台模拟器和模拟机器人。万博1manbetx扰乱®V5机器人在露台模拟器以及预配置一个虚拟的世界。控制算法是模拟仿真软件和模型界面的使用万博1manbetx露台联合仿真模块。这个例子还允许您执行稳定援助而举起重物从一个IMU传感器使用反馈。
设置露台模拟环境
要运行这个例子,请下载和设置预配置的虚拟机与ROS和露台。有关更多信息,请参见设置露台仿真环境。设置露台仿真环境中的主题,执行步骤中列出这些主题。
建立和运行仿真软件模型万博1manbetx
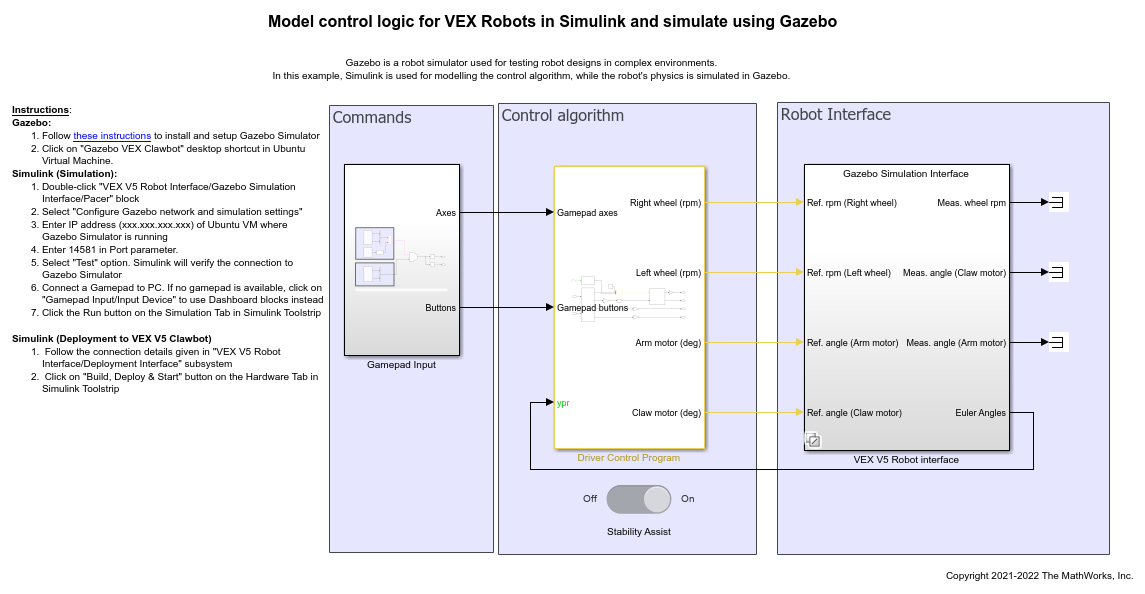
1。打开预配置仿真软件模型的例子。万博1manbetx
open_system (“vexv5_clawbot_gazebo”)
2。机器人导航到烦恼V5接口/露台仿真接口子系统和开放露台Pacer块。
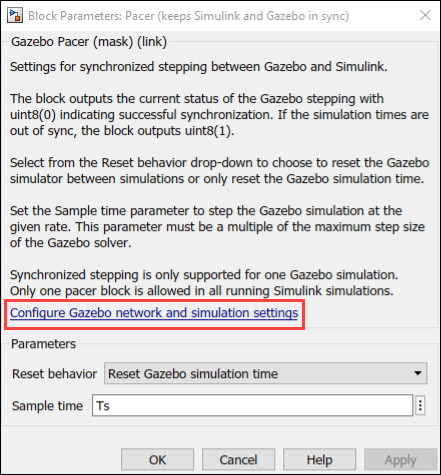
3所示。点击配置露台网络和仿真设置链接。进入虚拟机的IP地址。将端口设置为14581。
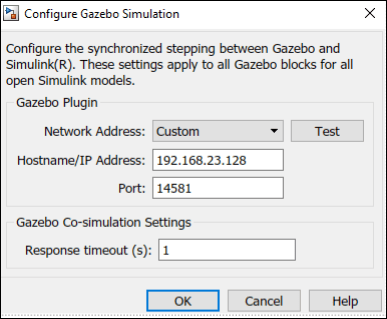
4所示。点击测试连接露台连接进行验证模型。点击好吧并关闭块对话框。
5。手柄配置:这个例子模拟手动操纵杆控制烦恼机器人。执行这些步骤配置手柄。
一个导航到手柄输入/手柄/操纵杆输入。
b。开放手柄模拟器块。
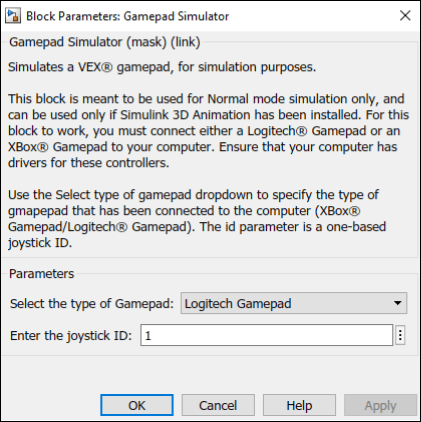
c。如果您使用的是烦恼手柄或罗技游戏控制器,选择罗技游戏控制器。如果您正在使用的Xbox控制器类型变化。
d。其它品牌的操纵杆,使用操纵杆输入从仿真软件3 d动画块万博1manbetx。
e。操纵杆ID1当只有一个操纵杆连接到电脑。如果有多个操纵杆或虚拟操纵杆,然后操纵杆ID需要正确设置。搜索“USB游戏控制器设置”在开始菜单,打开它。这个条目数量对应操纵杆ID。

f。如果没有可用操纵杆,双击输入设备变异源块使用仪表板块(手柄输入/仪表盘控制)控制机器人。
注意:只有使用按钮/滑块在模拟是活跃的。无关的按钮从仿真中删除。
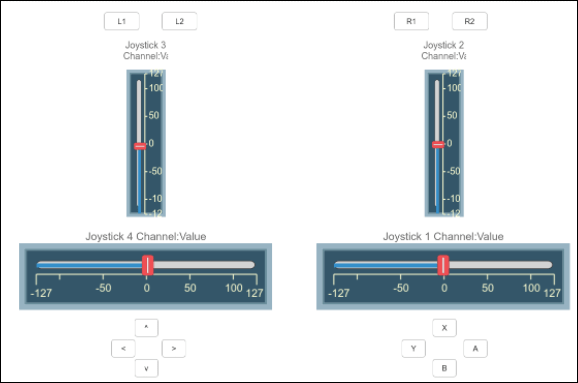
6。点击运行从模拟窗格。操纵杆轴(3,4)用于驱动控制。胳膊,爪被映射到按钮控制X和一个分别。
控制逻辑
司机控制程序子系统需要从操纵杆和给命令输入轮马达(rpm),手臂和爪汽车,这个屏幕所示。

商场模块块用于前进和转向输入转换为左、右车轮速度。速度限制器块防止突然改变车轮的速度,使运动平稳。手臂和爪角是与各自的齿轮比率在发送之前汽车。
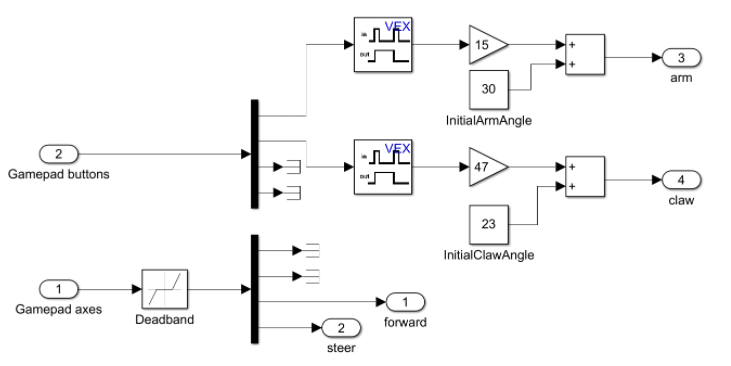
内部手柄的逻辑子系统,一些轴(X, Y)和按钮被映射到控制驱动,手臂和爪。锁块是用来保存信号从手柄按钮被释放。
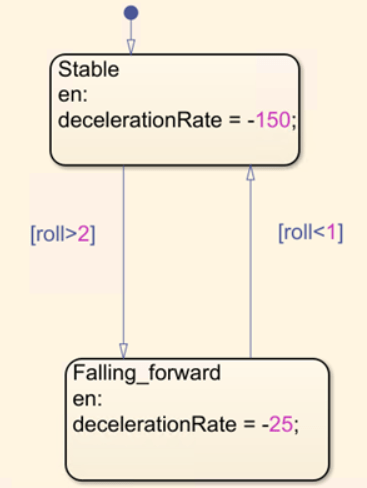
稳定支持逻辑
拿重物时,重心可能接近边缘机器人基地的转变。在这些情况下,任何突然加速(启动或停止)的机器人可能会使机器人。

这个问题可以在一定程度上解决使用更好的编程逻辑。在这个例子中,角反馈IMU传感器是用来检测当机器人开始翻倒。如果机器人开始,减速限制降低。这可以防止机器人停止突然跌倒。

的Stateflow®图有两个状态,稳定的和Falling_forward。机器人开始在稳定状态和交换机如果角穿过某个阈值。