从动臂和爪位置控制使用线跟踪和电位计
这个例子展示了如何使用仿真软件®编码器™支持包烦恼®EDR V5机器万博1manbetx人大脑创建一行万博1manbetx追随者机器人机械臂和控制使用扰乱Clawbot爪。手动机器人,一个对象放置在它的爪,遵循一个黑线在白色的表面。当达到黑线的结束时,由更广泛的黑线表示,机器人停止,降低了机械臂和滴对象间举行它的爪子。三个烦恼线追踪器将用于在黑线的目的,一个电位器的控制机械手臂的位置,和内置编码器V5智能电机控制的爪子打开。
介绍
万博1manbetx仿真软件编万博1manbetx码器支持包烦恼EDR版本5的机器人的大脑使您能够创建和运行仿真软件模型在烦恼V5机器人的大脑。
在本例中,您将学习如何使用烦恼线追踪器创建一个追随者机器人,烦恼电位器来控制机器人手臂的位置和内置编码器V5智能马达控制爪位置。您还将学习使用模拟输入块对烦恼V5接口模拟传感器机器人的大脑。在这个应用程序中,扰乱Clawbot放在黑色线跟踪的对象放置在它的爪子。机器人沿着黑线移动路径。当它遇到的线由更广泛的黑线表示,机器人停止,降低了机械臂和滴对象间举行它的爪子。下图说明了应用程序。

该算法用于机器人的线以下函数解释如下:
线追踪器安装在机器人,他们面临向下向地面以及它们之间的间距是机器人放在黑线时,上方的中心直线跟踪黑线和另外两个线追踪器是白色的表面。烦恼线跟踪提供了一个值从0到4095基于光强度。光强度值增加而减少。线追踪器安装面临向下,他们返回的值取决于表面反射的光强度。当机器人正上方的黑色线,中线跟踪阅读将高于左和右线追踪数据。为了区分黑色和白色表面使用线跟踪阅读,截断值/阈值大约是在黑人和白人之间表面选择阅读。如果线跟踪器读数高于阈值,上面的传感器是黑色的表面,因此,比较输出是1。比较输出是0线追踪器上面白色的表面。比较输出乘以权重给每个组合的独特价值的输出如下图所示。

产品价值获得重量乘法表示机器人的当前状态的黑线,用于采取适当的措施如下面表格所示。

先决条件
如果你是新模型,观察万博1manbetx万博1manbetx仿真软件快速入门视频。
完成开始使用烦恼EDR V5支持包的例子。万博1manbetx
所需的硬件
要运行这个示例,您需要以下硬件:
烦恼EDR版本5的机器人的大脑
V5智能汽车(4)
烦恼电位计
烦恼线跟踪器(3)
两轮机器人平台
V5机器人电池
600毫米智能电缆(4)
USB微电缆
跟踪利用A0白布~ 1.5”宽的黑线。
任务1 -硬件连接
1。两个V5智能汽车驱动左右轮子的机器人平台。发动机与电动机轴安装在机器人上朝外,使连接轴的车轮。连接左右智能汽车和智能电动机智能端口1和2分别在烦恼V5机器人的大脑。
2。三山烦恼线追踪器等机器人平台的前面,他们面临向下如下图所示。这使线追踪意义上的白色或黑色表面基于红外线反射的表面。因为烦恼线跟踪的范围大约是0.02到0.25英寸从地面,确保线追踪器安装在这个范围从地上。线追踪者之间的差距应该是这样的,当机器人的中心放在黑色的线,中线追踪高于黑线和左、右线追踪器上面白色的表面。连接的线追踪模拟港口开始从左到右,分别是B和C的烦恼V5机器人大脑,使用电话电缆。
3所示。连接机械手臂上的智能电动机智能端口3的烦恼V5机器人的大脑。插入轴的烦恼通过电机轴电位计。自电位计有限旋转约260度,确保电位器并不在其极限位置时通过电机轴插入它,以便从旋转机械手臂是不受限制由于电位计的位置。连接上的电位器模拟端口D烦恼V5机器人的大脑。
4所示。连接爪上的智能电动机智能端口4烦恼V5机器人的大脑。
5。V5机器人电池连接到烦恼V5机器人的大脑。
任务5 -建立和下载线追随者的仿真软件模型机器人手臂和爪位置控制万博1manbetx
在这个任务中,您将学习如何使用线追踪模型的逻辑控制4轮机器人的运动遵循黑线在白色的表面和停止当它到达黑线。您还将学习如何使用电位器来控制机械臂的运动和内置编码器的智能电动机控制爪运动。然后,您将构建和下载模型烦恼V5机器人的大脑。
open_system (“vexv5_pot_linetrack”);
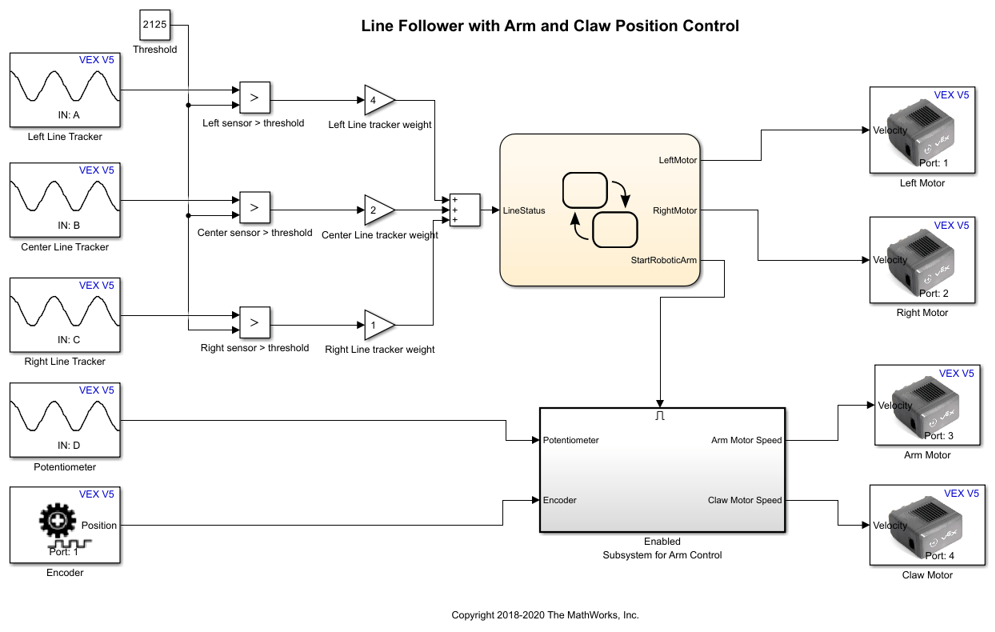
1。打开预配置模型(vexv5_pot_linetrack)。
2。仿真软件模型中注意以下几点:万博1manbetx
参数值港口为模拟输入块选择按照线跟踪和电位计连接任务1。参数值聪明的港口为智能汽车块选择按照电机连接任务1。
读取光强度的三线追踪器当机器人放置在追随者追踪。光强度比较阅读和使用一个指定的阈值常数块。这个常数块命名为阈值。如果一条线跟踪阅读大于阈值,这意味着追踪在黑线和输出的比较是1。同样,如果线跟踪器读数小于阈值,这意味着追踪在白色的表面和比较输出是0。因此,在比较之后,要么是0或1将输出跟踪阅读每一行对应。
每个比较输出乘以规定重量获得块和三个产品加在一起之间提供一个数字0到s manbetx 8457。每个输出值表示一个状态的机器人跟踪和适当的行动要求如表所示介绍部分。
左右汽车与轴连接到机器人平台面临着向外,向汽车提供的速度输入相反的迹象使其旋转方向相同,导致机器人直走。使机器人,提供的两个马达的速度输入相同的标志,汽车在相反的方向旋转。左右汽车提供的速度输入“-20”和“20”分别为直线运动。提供的电机的速度“30”把机器人左右‘-30’把机器人的速度。
的逻辑运动控制中实现了基于线跟踪器读数Stateflow®图如下所示。看到开始使用Stateflow在Stateflow介绍实施状态。

手臂运动和爪运动控制的逻辑的实现启用子系统。启用子系统是一个子系统,在时间的步骤执行允许输入具有积极的价值。当结束的黑线,输出StartRoboticArm的Stateflow图表更改1使子系统控制手臂运动。请参考创建一个支持子系统有关启用的更多信息子系统。
子系统使臂控制子系统所示为驱动臂包括实现电动机根据电位器阅读。电位计值比较值常数块命名为当手臂垂直电位计值和电位计值时手臂是水平的。比较输出的值使用逻辑运算符块和乘以速度“25”的价值常数块和提供手臂电动机的输入速度。因此,当启用了这个子系统,手臂运动提供了一个非零的速度值,只要限制之间的电位计读数的垂直和水平位置。
open_system (“手臂控制vexv5_pot_linetrack /启用子系统”);

当电位计读数超过手臂的值达到水平位置,子系统使爪控制子系统启用。下面这个子系统实现的逻辑驱动爪运动直到达到滴答计数,类似于子系统的逻辑控制手臂运动。
open_system (的手臂vexv5_pot_linetrack /启用子系统控制/启用子系统爪控制”);

3所示。仿真软件模型中万博1manbetx去建模选项卡并单击模型设置。

4所示。当配置参数页面打开,导航到硬件实现窗格。
设置硬件板来烦恼V5机器人的大脑。
5。在配置参数页面,导航到解算器面板和设置解算器来离散(没有连续状态)。
6。点击好吧。
7所示。在建立模型之前,确保烦恼V5机器人大脑连接到你的电脑USB微电缆。
8。仿真软件模型中万博1manbetx去硬件选项卡并单击构建、部署和启动。模型将会部署到烦恼V5机器人的大脑。

9。从电脑断开USB电缆。机器人在黑线,对象间举行它的爪子。运行这个程序(部署模型)通过使用仪表板烦恼V5机器人的大脑。机器人开始沿着黑线。行结束时,手臂和爪上的机器人停止和汽车降低机械臂驱动和释放对象。
其他的事情努力
在这个仿真软件模万博1manbetx型,使用阈值是:
2125年(三线追踪器)
390年(电位计值当手臂垂直)
1250年(电位计值水平臂时)
60(时钟计数的智能电动机爪时释放对象)。
然而,您可以执行参数调优和纠正这些阈值更好的性能的机器人。
例如,您可以创建一个简单的仿真软件模型,使用输出的三个万博1manbetx模拟输入块,用于三线追踪,并将它们连接到输入的三个显示块。

然后,您可以使用监视和优化功能仿真软件来计算阈值万博1manbetx线追踪器。
1。在模型运行时的烦恼V5机器人大脑(信号监控和参数调优的监视和优化操作),将机器人的白色表面跟踪。注意左边,中心和直线跟踪从相应的阅读材料显示块的仿真软件模型。万博1manbetx让我们把这些线追踪读数在白色表面 ,
, 和
和 。同样,注意线追踪数据通过将机器人,这样所有的三个传感器直接低于黑线。让我们把这些线跟踪器读数在黑线
。同样,注意线追踪数据通过将机器人,这样所有的三个传感器直接低于黑线。让我们把这些线跟踪器读数在黑线 ,
, 和
和 。记住,这条线追踪读数受光照条件影响,光源的位置和阴影在机器人的环境。因此,最好把数据在一个环境照明条件相似的地方你想驱动线追随者机器人。
。记住,这条线追踪读数受光照条件影响,光源的位置和阴影在机器人的环境。因此,最好把数据在一个环境照明条件相似的地方你想驱动线追随者机器人。
2。计算的平均 左线追踪,中线追踪和右线跟踪数据使用下面的公式:
左线追踪,中线追踪和右线跟踪数据使用下面的公式:

同样,计算平均值 左线追踪,中线追踪和右线跟踪数据使用下面的公式:
左线追踪,中线追踪和右线跟踪数据使用下面的公式:

3所示。黑人和白人之间的阈值计算表面以白人和黑人的平均表面平均如下所示:

计算阈值能够很好地反映价值范围为黑色和白色表面特定环境。注意,它可能需要改变阈值略高于计算值基于试验和观察的追随者机器人。
4所示。在硬件选项卡上,单击停止终止信号监控和参数调优。
