监控信号陀螺仪使用烦恼V5触摸屏校准
烦恼®V5触摸屏可用于可视化和监控陀螺的信号。这个话题可以帮助您使用烦恼V5触摸屏来可视化陀螺仪输出。
监控信号陀螺仪使用烦恼V5触摸屏校准,你需要得到正确的比例因子陀螺仪。每个烦恼V5陀螺仪可能不同于另一个。几秒钟的陀螺仪校准时启动程序。这消除了零抵消比例因子的但没有任何错误。例如,如果你把你的机器人通过90度,传感器的输出可能只有60度。这表明比例因子需要修正。执行这些步骤来获得正确的比例因子陀螺仪和监控信号使用烦恼V5触摸屏。
请注意
从MATLAB下面的说明工作®R2020b。如果您使用的是较早的版本,显示不会产生烦恼V5机器人的大脑。呈现相反,传感器值必须用监视和优化(外模式)特性。监视和优化功能的更多信息,请参阅调整和监控模型运行在烦恼EDR版本5的机器人的大脑。
步骤1:插入一个陀螺仪块。
在模拟选项卡上,单击库浏览器。
选择万博1manbetx>万博1manbetx仿真软件编万博1manbetx码器支持包扰乱大脑功能的机器人>传感器然后再添加陀螺仪块模型。
-
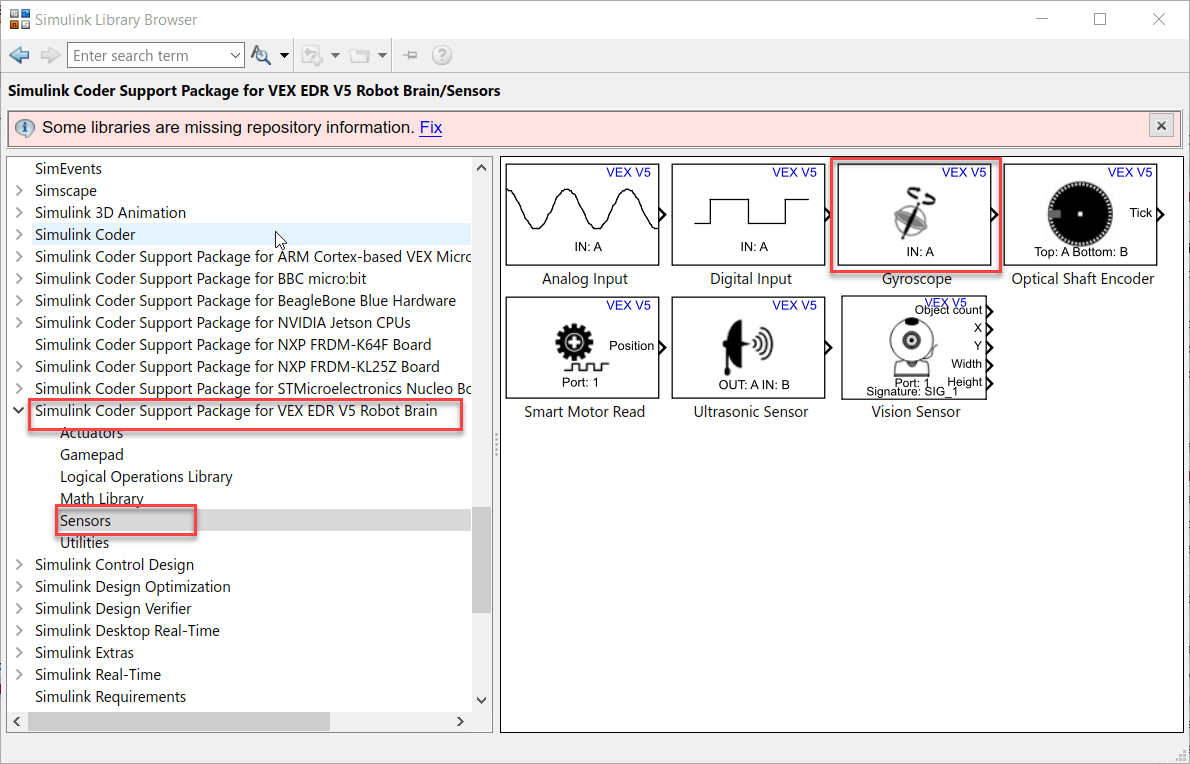

或者,您可以搜索烦恼陀螺仪块和插入它。

步骤2:添加一个获得块和一个《终结者》或外港块。连接它们,如下所示。
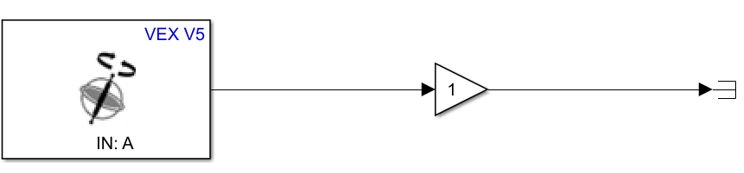
步骤3:名字的信号:双击信号线路和提供一个名称。

步骤4:添加显示万博1manbetx对模型仿真软件仪表板块。
显示块用于可视化V5触摸显示传感器的值。双击打开模型快速插入和搜索显示块。万博1manbetx选择显示(模型/ Dashboard)和插万博1manbetx入。

顾不上连接的信号显示块。
双击显示块开放块参数对话框。点击rawAng信号。
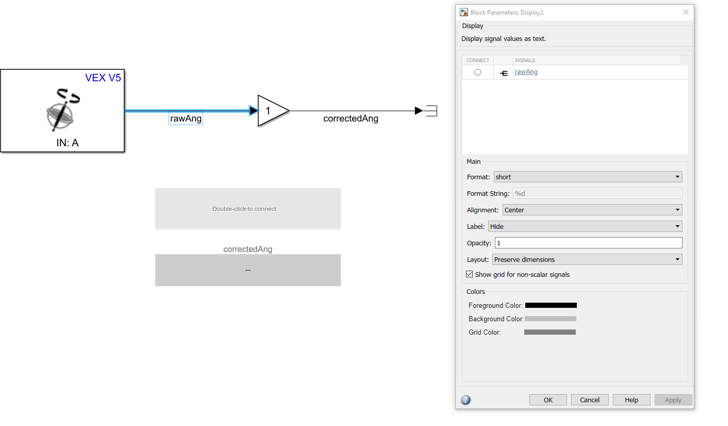
第六段:促进显示块面板。
显示模块必须被提升到一个面板来显示他们在烦恼V5触摸显示器。选择周围的区域块,促进他们面板如下图所示。

第七步:选择烦恼V5硬件
在硬件选项卡上,单击硬件设置打开配置参数对话框。
选择硬件实现窗格中,选择
烦恼V5机器人大脑从硬件参数列表,然后单击好吧。

第八步:连接陀螺仪块ADI港口一个烦恼V5中的大脑。然后,在硬件选项卡上,选择构建、部署和启动将模型部署到烦恼V5的大脑。

设置的比例因子获得块,旋转90度,记下的陀螺仪rawAng值显示在烦恼V5触摸屏。90除以rawAng并设置导致的获得块。
步骤9:验证。
再次部署模型和硬件验证值纠正。一个示例屏幕如下所示。
