横向的司机gydF4y2Ba
横向轨迹跟踪控制器gydF4y2Ba
- 库:gydF4y2Ba
车辆动力学Blockset /车辆场景/司机gydF4y2Ba
描述gydF4y2Ba
的gydF4y2Ba横向的司机gydF4y2Ba块实现了控制模型来生成规范化指导命令跟踪横向位移的引用。规范化指导命令可以- 1和1之间的不同。动力学模型,块使用线性单跟踪(自行车)模型。使用gydF4y2Ba横向的司机gydF4y2Ba块:gydF4y2Ba
关闭循环之间的一个预定义的路径和实际车辆运动。gydF4y2Ba
生成控制命令,跟踪预定义的路径。你可以连接gydF4y2Ba横向的司机gydF4y2Ba块输出转向块的输入。gydF4y2Ba
配置gydF4y2Ba
使用gydF4y2Ba外部行为gydF4y2Ba参数来创建输入端口信号,可以禁用,或覆盖闭环控制命令。块使用这个优先顺序输入命令:禁用(最高),覆盖。块使用这个优先顺序输入命令:禁用(最高),覆盖。gydF4y2Ba
这个表总结了外部动作参数。gydF4y2Ba
| 目标gydF4y2Ba | 外部动作参数gydF4y2Ba |
输入端口gydF4y2Ba |
数据类型gydF4y2Ba |
|---|---|---|---|
覆盖控制命令输入控制命令。gydF4y2Ba |
指导覆盖gydF4y2Ba |
|
布尔gydF4y2Ba |
|
双gydF4y2Ba |
||
指导命令在当前值。gydF4y2Ba |
转向持有gydF4y2Ba |
SteerHldgydF4y2Ba |
布尔gydF4y2Ba |
禁用控制命令。gydF4y2Ba |
转向禁用gydF4y2Ba |
SteerZerogydF4y2Ba |
布尔gydF4y2Ba |
使用gydF4y2Ba输出手轮角gydF4y2Ba参数指定的单位指导港口。gydF4y2Ba
设置gydF4y2Ba |
块实现gydF4y2Ba |
港口gydF4y2Ba |
|
|---|---|---|---|
|
指挥控制角,规范化的从1到1。块使用轮胎轮角饱和极限gydF4y2Ba轮胎轮角度限制,θgydF4y2Ba参数规范化的命令。gydF4y2Ba |
|
|
覆盖控制命令输入转向命令规范化从1到1。gydF4y2Ba |
|
||
|
指挥控制的角度,在单位指定的gydF4y2Ba角单元,angUnitsgydF4y2Ba。gydF4y2Ba |
|
|
覆盖指导命令输入控制命令,在单位指定的gydF4y2Ba角单元,angUnitsgydF4y2Ba。gydF4y2Ba |
|
||
同样,你可以指定一个轮胎轮角饱和限制使用gydF4y2Ba轮胎轮角度限制,θgydF4y2Ba参数。gydF4y2Ba
使用gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba参数指定类型的横向控制。表指定块的实现。gydF4y2Ba
设置gydF4y2Ba |
块实现gydF4y2Ba |
||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
最优单点预览(展望未来)控制模型开发的c . c .碎石gydF4y2Ba1、2、3gydF4y2Ba。模型代表司机转向控制行为在路径跟踪和避障动作。司机预览(展望未来)遵循一个预定义的路径。gydF4y2Ba |
||||||||||||
|
控制器使用gydF4y2Ba4gydF4y2Ba方法的位置误差和角度误差最小化当前体式的参考。gydF4y2Ba 在gydF4y2Ba参考控制gydF4y2Ba窗格中,使用:gydF4y2Ba
|
使用gydF4y2Ba角单元,angUnitsgydF4y2Ba参数指定角度单位输入和输出端口。gydF4y2Ba
控制器:预测横向轨迹跟踪gydF4y2Ba
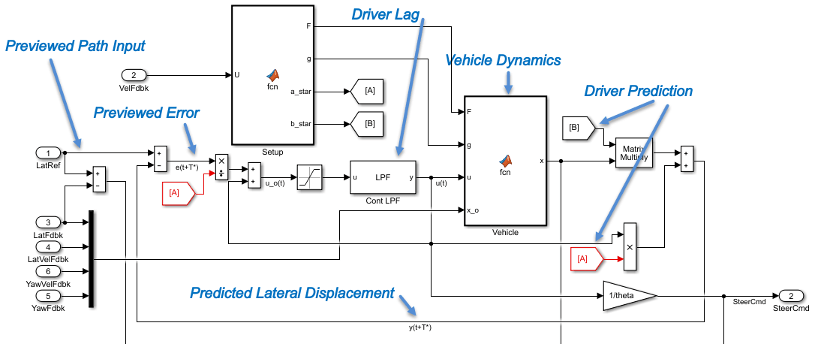
如果你设置gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba预测gydF4y2Ba,gydF4y2Ba横向的司机gydF4y2Ba块实现了最优的单点预览(展望未来)控制模型开发的c . c .碎石gydF4y2Ba1、2、3gydF4y2Ba。模型代表司机转向控制行为在路径跟踪和避障动作。司机预览(展望未来)遵循一个预定义的路径。块实现碎石模型:gydF4y2Ba
代表了动力学线性单跟踪车辆(自行车)gydF4y2Ba
最小化了预览误差信号在单点T *秒之前gydF4y2Ba
占司机延迟源于感性和神经机制gydF4y2Ba
这个数字说明了块实现单点的版本的驱动程序模型。gydF4y2Ba
横向和偏航运动,阻止实现这些线性动态方程。gydF4y2Ba
在矩阵表示法:gydF4y2Ba
单点模型假定最低预览误差信号在单点T *秒之前。*是司机能够预测未来车辆响应基于当前转向控制输入。b *是司机能够预测未来车辆响应基于当前车辆的状态。块使用这些方程。gydF4y2Ba
方程使用这些变量。gydF4y2Ba
| 一个gydF4y2Ba,gydF4y2BabgydF4y2Ba | 分别向前和向后的轮胎位置gydF4y2Ba |
| 米gydF4y2Ba | 汽车的质量gydF4y2Ba |
| 我gydF4y2Ba | 汽车转动惯量gydF4y2Ba |
| CgydF4y2BaɑFgydF4y2Ba | 前轮胎转弯系数gydF4y2Ba |
| CgydF4y2BaɑRgydF4y2Ba | 后轮胎转弯系数gydF4y2Ba |
| 一个*gydF4y2Ba,gydF4y2BabgydF4y2Ba*gydF4y2Ba | 分别驱动程序预测标量和矢量增益gydF4y2Ba |
| xgydF4y2Ba | 预测车辆状态向量gydF4y2Ba |
| vgydF4y2Ba | 横向速度gydF4y2Ba |
| rgydF4y2Ba | 偏航率gydF4y2Ba |
| ΨgydF4y2Ba | 前轮航向角gydF4y2Ba |
| ygydF4y2Ba | 侧向位移gydF4y2Ba |
| FgydF4y2Ba | 系统矩阵gydF4y2Ba |
| δgydF4y2Ba,gydF4y2BaδgydF4y2BaFgydF4y2Ba | 分别控制角和前轴引导角gydF4y2Ba |
| ggydF4y2Ba | 控制系数向量gydF4y2Ba |
| UgydF4y2Ba | 转发(纵向)车辆速度gydF4y2Ba |
| T *gydF4y2Ba | 预览时间窗口gydF4y2Ba |
| ƒ(t + t *)gydF4y2Ba | 预览路径输入T *秒之前gydF4y2Ba |
| UgydF4y2Ba | 提出车辆速度gydF4y2Ba |
| 米gydF4y2BaTgydF4y2Ba | 不断观察向量;提供车辆横向位置gydF4y2Ba |
单点模型由块发现指导命令实现最小化当地的一个性能指标,gydF4y2BaJgydF4y2Ba在当前预览间隔,(gydF4y2BatgydF4y2Ba,gydF4y2Bat + tgydF4y2Ba)。gydF4y2Ba
最小化gydF4y2BaJgydF4y2Ba对指导命令,必须满足此条件。gydF4y2Ba
你可以表达最优控制解决方案的当前最优和对应的非零预览输出误差gydF4y2BaT *gydF4y2Ba秒前gydF4y2Ba1、2、3gydF4y2Ba。gydF4y2Ba
块使用预览距离和车辆纵向速度来确定预览时间窗口。gydF4y2Ba
方程使用这些变量。gydF4y2Ba
| T *gydF4y2Ba | 预览时间窗口gydF4y2Ba |
| ƒ(t + t *)gydF4y2Ba | 预览输入路径gydF4y2BaT *gydF4y2Ba秒前gydF4y2Ba |
| y (t + t *)gydF4y2Ba | 预览植物输出gydF4y2BaT *gydF4y2Ba秒前gydF4y2Ba |
| e (t + t *)gydF4y2Ba | 预览误差信号gydF4y2BaT *gydF4y2Ba秒前gydF4y2Ba |
| u (t)gydF4y2Ba,gydF4y2BaugydF4y2BaogydF4y2Ba(t)gydF4y2Ba | 分别控制角和最优控制角gydF4y2Ba |
| lgydF4y2Ba | 预览的距离gydF4y2Ba |
| JgydF4y2Ba | 性能指标gydF4y2Ba |
| UgydF4y2Ba | 转发(纵向)车辆速度gydF4y2Ba |
单点模型实现的块介绍司机滞后。司机滞后延迟当司机占跟踪任务。具体地说,它是运输延误源于感性和神经机制。计算司机运输延迟,块实现了这个方程。gydF4y2Ba
方程使用这些变量。gydF4y2Ba
| τgydF4y2Ba | 司机运输延迟gydF4y2Ba |
| y (t + t *)gydF4y2Ba | 预览植物输出gydF4y2BaT *gydF4y2Ba秒前gydF4y2Ba |
| e (t + t *)gydF4y2Ba | 预览误差信号gydF4y2BaT *gydF4y2Ba秒前gydF4y2Ba |
| u (t)gydF4y2Ba,gydF4y2BaugydF4y2BaogydF4y2Ba(t)gydF4y2Ba | 分别控制角和最优控制角gydF4y2Ba |
| JgydF4y2Ba | 性能指标gydF4y2Ba |
控制器:斯坦利横向轨迹跟踪gydF4y2Ba
如果你设置gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba斯坦利gydF4y2Ba块实现了斯坦利方法gydF4y2Ba4gydF4y2Ba。计算转向角命令,斯坦利控制器的位置误差和角度误差最小化当前体式的参考。车辆的行驶方向决定了这些误差值。gydF4y2Ba
计算转向角命令,控制器的位置误差和角度误差最小化当前体式的参考。gydF4y2Ba
的gydF4y2Ba位置误差gydF4y2Ba是横向距离车辆重心(CG)路径上的参考点。gydF4y2Ba
的gydF4y2Ba角误差gydF4y2Ba车辆的角度对参考路径。gydF4y2Ba
港口gydF4y2Ba
输入gydF4y2Ba
LongRefgydF4y2Ba——纵向位移参考gydF4y2Ba
标量gydF4y2Ba
纵向的质心(CM)位移参考,在惯性参考系,m。gydF4y2Ba
依赖关系gydF4y2Ba
启用该端口:gydF4y2Ba
集gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba
斯坦利gydF4y2Ba清晰的gydF4y2Ba参考向量输入和反馈gydF4y2Ba
LatRefgydF4y2Ba——侧向位移的参考gydF4y2Ba
标量gydF4y2Ba
横向的质心(CM)位移参考,在惯性参考系,m。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,做这两种:gydF4y2Ba
集gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba
斯坦利gydF4y2Ba和明确的gydF4y2Ba参考向量输入和反馈gydF4y2Ba。gydF4y2Ba集gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba
预测gydF4y2Ba。gydF4y2Ba
EnblSteerOvrgydF4y2Ba——允许转向命令覆盖gydF4y2Ba
标量gydF4y2Ba
使转向命令覆盖。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,选择gydF4y2Ba指导覆盖gydF4y2Ba。gydF4y2Ba
数据类型:gydF4y2Ba布尔gydF4y2Ba
SteerOvrCmdgydF4y2Ba——指导覆盖命令gydF4y2Ba
标量gydF4y2Ba
指导覆盖命令。gydF4y2Ba
使用gydF4y2Ba输出手轮角gydF4y2Ba参数指定的单位指导港口。gydF4y2Ba
设置gydF4y2Ba |
块实现gydF4y2Ba |
港口gydF4y2Ba |
|
|---|---|---|---|
|
指挥控制角,规范化的从1到1。块使用轮胎轮角饱和极限gydF4y2Ba轮胎轮角度限制,θgydF4y2Ba参数规范化的命令。gydF4y2Ba |
|
|
覆盖控制命令输入转向命令规范化从1到1。gydF4y2Ba |
|
||
|
指挥控制的角度,在单位指定的gydF4y2Ba角单元,angUnitsgydF4y2Ba。gydF4y2Ba |
|
|
覆盖指导命令输入控制命令,在单位指定的gydF4y2Ba角单元,angUnitsgydF4y2Ba。gydF4y2Ba |
|
||
依赖关系gydF4y2Ba
要启用这个端口,选择gydF4y2Ba指导覆盖gydF4y2Ba。gydF4y2Ba
数据类型:gydF4y2Ba双gydF4y2Ba
SteerHldgydF4y2Ba——转向持有gydF4y2Ba
标量gydF4y2Ba
布尔信号,把指导命令在当前值。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,选择gydF4y2Ba转向持有gydF4y2Ba。gydF4y2Ba
数据类型:gydF4y2Ba布尔gydF4y2Ba
SteerZerogydF4y2Ba——禁用控制命令gydF4y2Ba
标量gydF4y2Ba
禁用控制命令。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,选择gydF4y2Ba转向禁用gydF4y2Ba。gydF4y2Ba
数据类型:gydF4y2Ba布尔gydF4y2Ba
YawRefgydF4y2Ba- - - - - -偏航角的参考gydF4y2Ba
标量gydF4y2Ba
车辆偏航角,gydF4y2BaΨgydF4y2BaogydF4y2Ba在惯性参考系,在指定的单位gydF4y2Ba角单元,angUnitsgydF4y2Ba。gydF4y2Ba
依赖关系gydF4y2Ba
启用该端口:gydF4y2Ba
集gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba
斯坦利gydF4y2Ba清晰的gydF4y2Ba参考向量输入和反馈gydF4y2Ba
RefPosegydF4y2Ba——参考姿势gydF4y2Ba
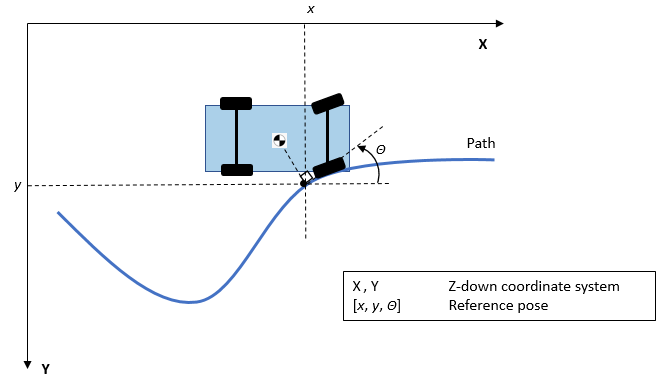
(gydF4y2BaxgydF4y2Ba,gydF4y2BaygydF4y2Ba,gydF4y2BaΘgydF4y2Ba)向量gydF4y2Ba
参考姿势,指定为一个(gydF4y2BaxgydF4y2Ba,gydF4y2BaygydF4y2Ba,gydF4y2BaΘgydF4y2Ba)向量。gydF4y2BaxgydF4y2Ba和gydF4y2BaygydF4y2Ba在米,gydF4y2BaΘgydF4y2Ba指定的单位吗gydF4y2Ba角单元,angUnitsgydF4y2Ba。gydF4y2Ba
xgydF4y2Ba和gydF4y2BaygydF4y2Ba指定引导车辆的参考点。gydF4y2BaΘgydF4y2Ba指定路径的定向角在这个参考点和逆时针方向为正。gydF4y2Ba
路径上的参考点是点,接近车辆的重心。您可以使用z轴向上或Z-down车辆坐标系,只要你使用相同的坐标系统(z轴向上或Z-down)块输入和参数。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,设置gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba斯坦利gydF4y2Ba并选择gydF4y2Ba向量输入和反馈提出供参考gydF4y2Ba。gydF4y2Ba
数据类型:gydF4y2Ba单gydF4y2Ba|gydF4y2Ba双gydF4y2Ba
VelFdbkgydF4y2Ba——纵向车辆速度gydF4y2Ba
标量gydF4y2Ba
纵向车辆速度,gydF4y2BaUgydF4y2Bavehicle-fixed帧,在m / s。gydF4y2Ba
CurrPosegydF4y2Ba——当前的姿势gydF4y2Ba
(gydF4y2BaxgydF4y2Ba,gydF4y2BaygydF4y2Ba,gydF4y2BaΘgydF4y2Ba)向量gydF4y2Ba
车辆的当前姿态,指定为一个(gydF4y2BaxgydF4y2Ba,gydF4y2BaygydF4y2Ba,gydF4y2BaΘgydF4y2Ba)向量。gydF4y2BaxgydF4y2Ba和gydF4y2BaygydF4y2Ba在米,gydF4y2BaΘgydF4y2Ba在指定的单位gydF4y2Ba角单元,angUnitsgydF4y2Ba。gydF4y2Ba
xgydF4y2Ba和gydF4y2BaygydF4y2Ba指定车辆的位置,这被定义为车辆重心。您可以使用z轴向上或Z-down车辆坐标系,只要你使用相同的坐标系统(z轴向上或Z-down)块输入和参数。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,设置gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba斯坦利gydF4y2Ba并选择gydF4y2Ba向量输入和反馈提出供参考gydF4y2Ba。gydF4y2Ba
数据类型:gydF4y2Ba单gydF4y2Ba|gydF4y2Ba双gydF4y2Ba
LatFdbkgydF4y2Ba——侧向位移gydF4y2Ba
标量gydF4y2Ba
横向厘米位移,gydF4y2BaygydF4y2BaogydF4y2Ba在惯性参考系,在m。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,做这两种:gydF4y2Ba
集gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba
斯坦利gydF4y2Ba和明确的gydF4y2Ba参考向量输入和反馈gydF4y2Ba。gydF4y2Ba集gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba
预测gydF4y2Ba。gydF4y2Ba
LatVelFdbkgydF4y2Ba——横向车辆速度gydF4y2Ba
标量gydF4y2Ba
车辆横向速度,gydF4y2BavgydF4y2BaogydF4y2Bavehicle-fixed帧,在m / s。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,设置gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba预测gydF4y2Ba。gydF4y2Ba
YawFdbkgydF4y2Ba——车辆偏航角gydF4y2Ba
标量gydF4y2Ba
车辆偏航角,gydF4y2BaΨgydF4y2BaogydF4y2Ba在惯性参考系,在指定的单位gydF4y2Ba角单元,angUnitsgydF4y2Ba。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,做这两种:gydF4y2Ba
集gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba
斯坦利gydF4y2Ba和明确的gydF4y2Ba向量输入和反馈提出供参考gydF4y2Ba。gydF4y2Ba集gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba
预测gydF4y2Ba。gydF4y2Ba
YawVelFdbkgydF4y2Ba- - - - - -偏航率gydF4y2Ba
标量gydF4y2Ba
偏航率,gydF4y2BargydF4y2BaogydF4y2Bavehicle-fixed帧,在单位指定的gydF4y2Ba角单元,angUnitsgydF4y2Ba每一秒。gydF4y2Ba
依赖关系gydF4y2Ba
要启用这个端口,设置gydF4y2Ba横向控制类型,controlTypeLatgydF4y2Ba来gydF4y2Ba预测gydF4y2Ba。gydF4y2Ba
输出gydF4y2Ba
参数gydF4y2Ba
引用gydF4y2Ba
[1]碎石,C . C。“线性系统的最优预览控制”。gydF4y2Ba杂志的动态系统、测量和控制gydF4y2Ba。102卷,3号,1980年9月。gydF4y2Ba
[2]碎石,C . C。“应用程序模拟闭环最优预览控制的汽车驾驶”。gydF4y2BaIEEE系统,人,控制论gydF4y2Ba。问题6卷。11日,1981年6月。gydF4y2Ba
[3]碎石,C . C。gydF4y2Ba开发驱动程序/车辆转向交互模型进行动态分析gydF4y2Ba。最终技术报告umtri - 88 - 53年。密歇根州安阿伯:密歇根大学交通研究所,1988年12月。gydF4y2Ba
[4]霍夫曼,加布里埃尔·M。,Claire J. Tomlin, Michael Montemerlo, and Sebastian Thrun. "Autonomous Automobile Trajectory Tracking for Off-Road Driving: Controller Design, Experimental Validation and Racing."美国控制会议gydF4y2Ba。2007年,页2296 - 2301。doi: 10.1109 / ACC.2007.4282788gydF4y2Ba
扩展功能gydF4y2Ba
另请参阅gydF4y2Ba
纵向驱动程序gydF4y2Ba|gydF4y2Ba预测司机gydF4y2Ba
你也可以从下面的列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba