三轴惯性测量单元GydF4y2Ba
实施三轴惯性测量单元(IMU)GydF4y2Ba
- 图书馆:GydF4y2Ba
车辆动力学阻滞 /传感器GydF4y2Ba

描述GydF4y2Ba
这GydF4y2Ba三轴惯性测量单元GydF4y2Ba块实现了一个惯性测量单元(IMU),其中包含三轴加速度计和三轴陀螺仪。GydF4y2Ba
有关方程式和错误应用的说明,请参见GydF4y2Ba三轴加速度计GydF4y2Ba(航空空间)GydF4y2Ba和GydF4y2Ba三轴陀螺仪GydF4y2Ba(航空空间)GydF4y2Ba。GydF4y2Ba
限制GydF4y2Ba
振动误差,滞后会影响,异弹性偏置和动态渗透偏置在此块中没有解释。GydF4y2Ba
该块并非旨在建模仪器不同形式的内部动力学。GydF4y2Ba
端口GydF4y2Ba
输入GydF4y2Ba
输出GydF4y2Ba
参数GydF4y2Ba
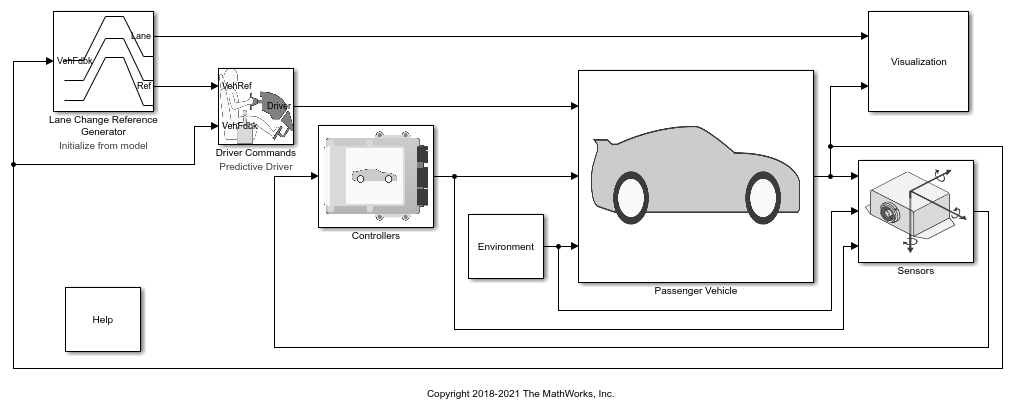
模型示例GydF4y2Ba
参考GydF4y2Ba
[1] Rogers,R。M.,GydF4y2Ba集成导航系统中的应用数学GydF4y2Ba,AIAA教育系列,2000年。GydF4y2Ba
扩展功能GydF4y2Ba
版本历史记录GydF4y2Ba
也可以看看GydF4y2Ba
三轴陀螺仪GydF4y2Ba(航空空间)GydF4y2Ba|GydF4y2Ba三轴加速度计GydF4y2Ba(航空空间)GydF4y2Ba
您还可以从以下列表中选择一个网站:GydF4y2Ba
美洲GydF4y2Ba
- AméricaLatinaGydF4y2Ba(Español)GydF4y2Ba
- 加拿大GydF4y2Ba(英语)GydF4y2Ba
- 美国GydF4y2Ba(英语)GydF4y2Ba
欧洲GydF4y2Ba
- 比利时GydF4y2Ba(英语)GydF4y2Ba
- 丹麦GydF4y2Ba(英语)GydF4y2Ba
- 德国GydF4y2Ba(德意志)GydF4y2Ba
- españaGydF4y2Ba(Español)GydF4y2Ba
- 芬兰GydF4y2Ba(英语)GydF4y2Ba
- 法国GydF4y2Ba(Français)GydF4y2Ba
- 爱尔兰GydF4y2Ba(英语)GydF4y2Ba
- 意大利GydF4y2Ba(意大利语)GydF4y2Ba
- 卢森堡GydF4y2Ba(英语)GydF4y2Ba
- 荷兰GydF4y2Ba(英语)GydF4y2Ba
- 挪威GydF4y2Ba(英语)GydF4y2Ba
- ÖsterreichGydF4y2Ba(德意志)GydF4y2Ba
- 葡萄牙GydF4y2Ba(英语)GydF4y2Ba
- 瑞典GydF4y2Ba(英语)GydF4y2Ba
- 瑞士GydF4y2Ba
- 英国GydF4y2Ba(英语)GydF4y2Ba
亚太地区GydF4y2Ba
- 澳大利亚GydF4y2Ba(英语)GydF4y2Ba
- 印度GydF4y2Ba(英语)GydF4y2Ba
- 新西兰GydF4y2Ba(英语)GydF4y2Ba
- 中国GydF4y2Ba
- 日本GydF4y2Ba(日本语)GydF4y2Ba
- 한국GydF4y2Ba(한국어)GydF4y2Ba