发送和接收双车道变换场景数据
此示例演示如何使用仿真3D消息集和模拟三维消息获取块,以便在运行双车道变换机动时与三维可视化环境通信。具体而言,您可以使用:
模拟三维消息获取阻止在机动期间检索车辆击中的锥体。
仿真3D消息集阻止控制交通信号灯。
有关运行该示例所需的最低硬件,请参阅3D可视化引擎要求。
进行一次双车道变换动作,使其撞上圆锥体
通过启用3D可视化环境,运行击中锥体的双车道更改机动。
创建和打开双线车道更改参考应用程序项目的工作副本。
启用三维可视化环境。在可视化子系统中,打开3D引擎块掩码并选择启用。应用更改并保存模型。
或者,在MATLAB上®在命令提示下,输入此代码。
在模型的顶级,设置车道改变参考生成器封锁参数,使车辆无法成功完成机动。设置这些封锁参数,应用更改,并保存模型。
操纵开始时间到
5.。纵向入口速度设定点到
40。
或者,在MATLAB命令提示下,输入以下代码。
运行机动。当模拟运行时,在AutoVrtlEnv窗口中,您可以看到vehicle hitting the cones.


用模拟三维消息获取阻止检索锥体数据
使用模拟三维消息获取阻止在机动期间检索车辆击中的锥体。默认情况下,操作使用双车道更改场景。
导航到可视化> 3D引擎子系统。右键单击3D引擎阻止并选择面具>看看面膜。在可视化> 3D引擎> 3D引擎子系统中,插入这些块:
模拟三维消息获取
陈列
数学函数
设定模拟三维消息获取块参数,以便块从双车道更改场景检索圆锥体数据。设置这些块参数,应用更改,并保存模型。
信号名称,符号到
努莫夫科尼希特数据类型,数据类型到
布尔值消息大小,MsgSize到
[2 15]采样时间到
-1

或者,在MATLAB命令提示下,输入以下代码。
设定数学函数堵塞产出维度参数到
翻倒。运行模拟时数学函数块输出A.[15 2]大批。
或者,在MATLAB命令提示下,输入以下代码。
连接模拟三维消息获取那数学函数, 和陈列如图所示的块。确认块参数。保存模型。

验证模拟三维场景配置块在模拟三维消息获取堵塞。那种方式,虚幻引擎®3D可视化环境准备之前的数据模拟三维消息获取block收到它。若要检查块执行顺序,请右键单击块并选择性质.在全体的tab,确认这些优先事项设置:
模拟三维场景配置-
0.模拟三维消息获取-
1
有关执行顺序的更多信息,请参阅控制和显示执行顺序(万博1manbetxSimulink)。
运行机动。随着模拟运行,显示块更新
ReadMsg布尔值1当车辆撞到相应的锥体时。
结果表明车辆命中
SM_CONE20.那sm_cone29., 和SM_CONE30.在机动期间。此表提供了与之对应的双车道更改场景锥名称
ReadMsg数组元素。模拟三维消息获取块
ReadMsg价值虚幻®编辑锥名称
模拟三维消息获取块数组元素
虚幻编辑锥名称
Readmsg(1,1)SM_Cone5Readmsg(2,1)SM_CONE10.Readmsg(1,2)SM_Cone4Readmsg(2,2)sm_cone09.Readmsg(1,3)SM_Cone3Readmsg(2,3)sm_cone08.Readmsg(1,4)SM_Cone2Readmsg(2,4)sm_cone07.Readmsg(1,5)sm_cone01.Readmsg(2,5)sm_cone06.Readmsg(1,6)sm_cone15.Readmsg(2,6)SM_CONE20.Readmsg(1,7)SM_CONE14.Readmsg(2,7)SM_CONE19.Readmsg(1,8)SM_CONE13.Readmsg(2,8)SM_CONE18.Readmsg(1,9)sm_cone12.Readmsg(2,9)SM_CONE17.Readmsg(1,10)sm_cone11.ReadMsg(2,10)SM_CONE16.Readmsg(1,11)SM_CONE25.Readmsg(2,11)SM_CONE30.Readmsg(1,12)SM_CONE24.Readmsg(2,12)sm_cone29.Readmsg(1,13)SM_CONE23.Readmsg(2,13)sm_cone28.Readmsg(1,14)SM_CONE22Readmsg(2,14)SM_CONE27.Readmsg(1,15)sm_cone21.Readmsg(2,15)sm_cone26.




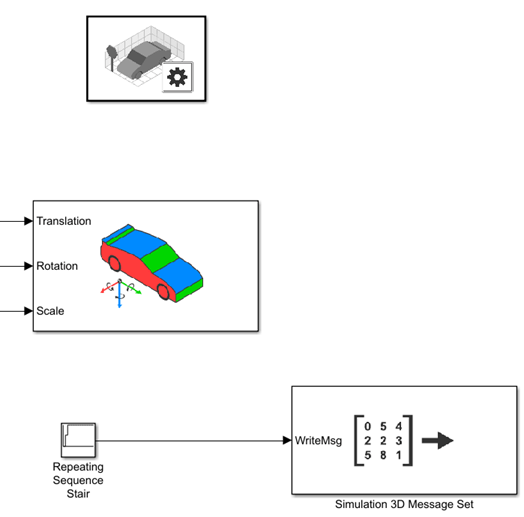
用仿真3D消息集阻止控制交通信号灯
导航到可视化> 3D引擎子系统。右键单击3D引擎阻止并选择面具>看看面膜。在可视化> 3D引擎> 3D引擎子系统中,插入这些块:
仿真3D消息集
数据类型转换
楼梯生成器
设定仿真3D消息集块参数,以便块将交通信号数据发送到双车道更改场景。设置这些块参数,应用更改,并保存模型。
信号名称,符号到
交通灯1采样时间到
-1

此表提供了与场景交通信号灯颜色相对应的场景交通信号灯颜色
书面形式双车道变换场景中的值。仿真3D消息集块
书面形式价值交通灯1颜色0.红色的1黄色2绿色或者,在MATLAB命令提示下,输入以下代码。
设定数据类型转换要将数据转换为的块参数
int32。设置这些块参数,应用更改并保存模型。输出数据类型到
int32
或者,在MATLAB命令提示下,输入以下代码。
设定楼梯生成器阻塞参数以发送与红色、黄色和绿色交通灯信号相对应的命令。设置这些块参数、应用更改并保存模型。
时间到
[0.2,3,5,8]振幅到
[0,0,1,2,2]采样时间到
1

或者,在MATLAB命令提示下,输入此代码。应用块更改并保存模型。
如图所示连接块。确认块参数和信号连接。保存模型。
验证仿真3D消息集块在模拟三维场景配置堵塞。那样,仿真3D消息集在虚幻引擎3D可视化环境接收信号数据之前准备信号数据。要检查块执行顺序,请右键单击块并选择性质.在全体的tab,确认这些优先事项设置:
模拟三维场景配置-
0.仿真3D消息集-
-1
有关执行顺序的更多信息,请参阅控制和显示执行顺序(万博1manbetxSimulink)。
运行机动。当模拟运行时,在AutoVrtlEnv窗口中,您可以看到
交通灯1从红色变为黄色到绿色。
时间范围
书面形式价值交通灯1颜色0–3
0.红色的3-5
1黄色5-8
2绿色




也可以看看
3D引擎|双车道变换|模拟三维消息获取|仿真3D消息集|模拟三维场景配置
相关例子
更多关于
您还可以从以下列表中选择一个网站: