初始化
初始化算法执行状态(可选)
描述
这初始化方法在自动化算法运行之前初始化自动化算法的状态。
客户的客户Automationsgorithm可以选择实现此方法。
输入参数
框架-对应于时间间隔的框架
数字矩阵|PointCloud目的
与时间间隔开始的框架,指定为数字矩阵图片信号或PointCloud对象的PointCloud信号。
选择用于自动化的标签,指定为具有这些列的表。
| 列名 | 描述 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
类型 |
|
||||||||||||
姓名 |
包含标签名称的字符向量。 | ||||||||||||
时间 |
类型标量双倍的当标签被标记时,这在几秒钟内指定时间。 |
||||||||||||
位置 |
标签在框架中的位置。该矢量的格式取决于标签类型。
|
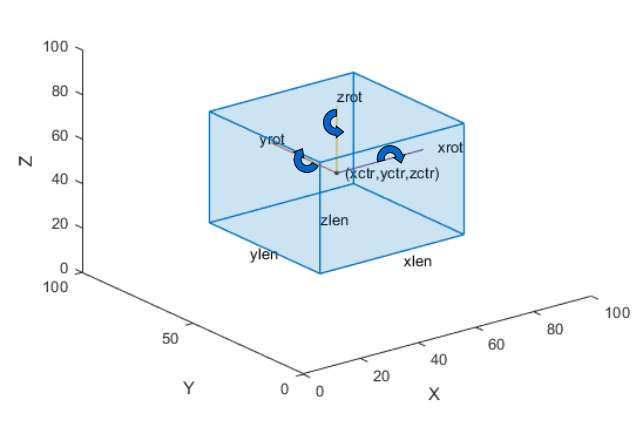
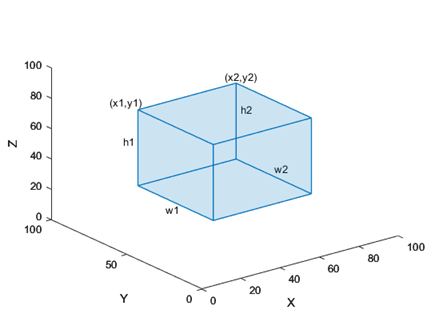
表的每一行都对应于选择自动化的标签。这个标记菌瘤表包含一个矩形标签,一个带有五个点的线标签和一个Cuboid标签。
类型名称时间位置_________ ______________________________________矩形'car'0.033333 [1x4 double]线'lanemarker'0.066667 [5x2 double] cuboid'0.0999999 [1x9 double]
