视频和网络研讨会
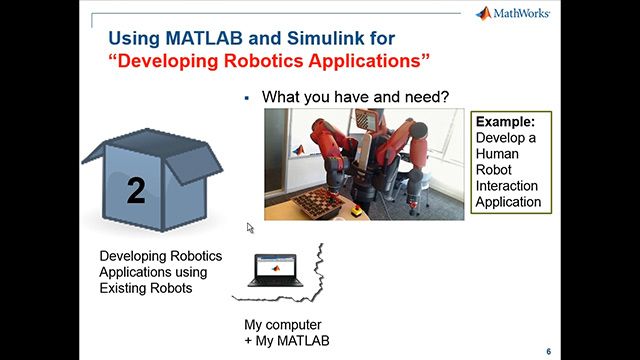
机器人系统工具箱™支持与关节机器人相关的工作流程。万博1manbetx你可以在MATLAB中向机械手发送命令®.联合位置命令通过ROS网络上的ROS动作客户端发送。您也可以计算关节位置为一个理想的最终效果的位置。刚体树定义了机器人的几何形状和关节约束,它与逆运动学一起用于提供机器人的关节位置。然后你可以将这些关节位置作为一个轨迹来命令机器人移动。
记录:2017年3月8日
基于MATLAB的桥接无线通信设计与测试
反馈
特色产品
查看更多相关视频
选择网站
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您所在的位置,我们建议您选择:.
您也可以从以下列表中选择一个网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
联系当地办事处