在这个视频中,我们将讨论方程的集合,你需要实现卡尔曼滤波算法。让我们回顾一下例子,我们介绍了在之前的视频。你加入一个竞争赢得了大奖。你被要求设计一个自动驾驶汽车需要开一公里100种不同的地形。
在每个试验中,汽车必须停止尽可能接近终点线。的竞争,每个团队的平均计算试验位置,和汽车的所有者的最小误差方差平均试验位置接近1公里大奖。
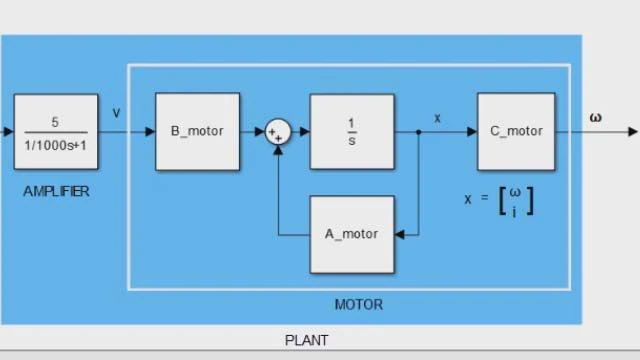
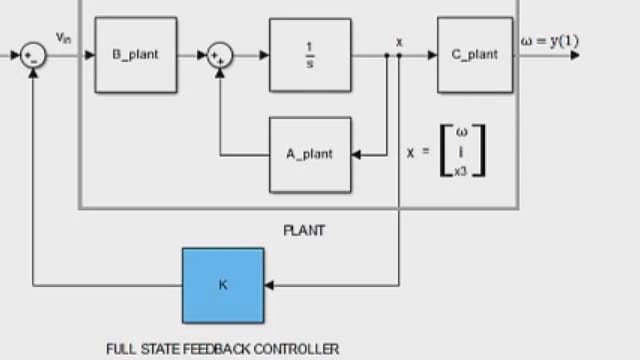
在这个示例中,我们还展示了汽车动力学和我们国家的汽车模型系统,和我们讨论了过程和测量噪声协方差。最后,我们说,你可以赢得比赛通过使用卡尔曼滤波,计算最优的汽车的位置以最小方差的无偏估计。
这个最优估计是发现一起预测和测量概率函数相乘,定标结果,计算得到的概率密度函数的均值。的乘法计算这两个概率密度函数与离散卡尔曼滤波方程所示。
这一个铃吗?是不是类似于先前讨论的状态观测器方程,我们视频吗?事实上,卡尔曼滤波器是一个类型的状态观测器,但它是专为随机系统。这是卡尔曼滤波方程如何与我们讨论了概率密度函数。
第一部分预测当前状态用状态估计从先前的步伐和当前输入。请注意,这两个国家互相估计是不同的。我们将展示预测状态估计和这个符号。这也被称为先验估计,因为它是计算当前测量之前。
我们现在可以重写这样的方程。方程使用测量的第二部分并将其融入到预测更新的先验估计。我们会叫后验估计的结果。你想赢得大奖,对吧?然后这些方程需要运行在你的车情事属实者。
看起来有点可怕吗?如果我们把一切都颠倒了吗?没有太大的改变,不是吗?好的,我们会一步一步算法方程。卡尔曼滤波器是一个两步的过程。我们先开始预测的部分。在这里,系统模型用于计算先验状态估计误差协方差p。
为我们的国家系统,p是先验估计的方差,它可以被认为是一个测量的不确定性估计状态。这种差异来自不确定的过程噪声和传播k - 1 x的帽子。
在算法的一开始,k - 1 x的帽子和p值来自他们的初步估计。第二步算法的预测步骤中使用先验估计计算和更新他们的后验估计误差协方差。
卡尔曼增益计算,使其最小化后验误差协方差。让这条代表x帽子k的计算。通过重修正项,卡尔曼增益决定高度测量和先验估计有助于计算x帽子k。
如果测量噪声小,测量是信任越来越有利于计算x帽子k比先天的状态估计。在相反的情况下,先验估计误差很小,先验估计是可信的。和x帽子k的计算主要是来自这个估算。
我们还可以展示这个数学通过观察两种极端情况。假设在第一种情况下,测量协方差为0。卡尔曼增益,计算时取其极限r为0。我们插入0 r和看到这两项彼此抵消。
当r趋于0,卡尔曼增益方法c的倒数等于1在我们的系统。堵塞k、c的逆,入组后验估计表明,k等于yk x的帽子。所以只计算来自于测量如预期。
现在,如果我们更新我们的情节,我们可以用一个脉冲函数,显示测量与这个橙色的垂直线所示。注意,测量的方差为0,因为r为0。我们发现后验估计等于测量,所以我们可以通过相同的脉冲函数显示它。
另一方面,如果先验误差协方差接近0,然后卡尔曼增益形式为0。因此,这一项的贡献x帽子k被忽略,并计算x帽子k来自先天的状态估计。在情节上,我们将展示先验状态估计脉冲函数,方差为零。
由于后验估计等于先验估计,我们将展示它与相同的脉冲函数。一旦我们更新的计算方程,在接下来的步伐,后验估计是用来预测的先验估计,算法重演。
请注意,当前状态估计,该算法不需要过去的所有信息。它只需要估计状态和误差协方差矩阵从之前的步伐和当前测量。这就是使卡尔曼滤波递归。现在你知道方程组需要实现卡尔曼滤波算法,你打算做什么当你赢得比赛大奖?
如果你不能决定,这是一个建议。注意,卡尔曼滤波器也称为传感器融合算法。所以你可以购买一个额外的传感器如IMU,和实验使用多个传感器是否会改善你的无人驾驶汽车的估计位置。如果你有两个测量值,y的维度,c,和k矩阵将改变如下所示。
但基本上,你仍然遵循相同的逻辑来计算最优状态估计。情节,我们会有一个概率密度函数对IMU的测量。这一次,我们会把三个概率密度函数相乘找到车的位置的最优估计。
到目前为止,我们有一个线性系统,但是,如果你有一个非线性系统,想使用卡尔曼滤波器?下一节,我们将讨论非线性状态估计。