控制系统工具箱
设计和分析控制系统
控制系统工具箱™提供用于系统地分析,设计和调整线性控制系统的算法和应用。您可以将系统指定为传输函数,状态空间,零杆增益或频率响应模型。Apps和功能,例如步骤响应图和Bode Plot,允许您在时间和频域中分析和可视化系统行为。
您可以使用交互技术如波德环整形和根轨迹方法来调整补偿器参数。工具箱自动调整SISO和MIMO补偿器,包括PID控制器。补偿器可以包括跨越多个反馈回路的多个可调块。您可以调整增益计划控制器并指定多个调整目标,如参考跟踪、干扰抑制和稳定裕度。您可以通过验证上升时间、超调量、沉淀时间、增益和相位裕度以及其他要求来验证设计
开始:

传递函数和状态空间模型
使用传递函数或状态空间表示创建线性时不变系统模型。操纵PID控制器和频率响应数据。模型系统是SISO或MIMO,连续的或离散的。通过串联、并行或反馈连接基本模型来构建复杂的框图。

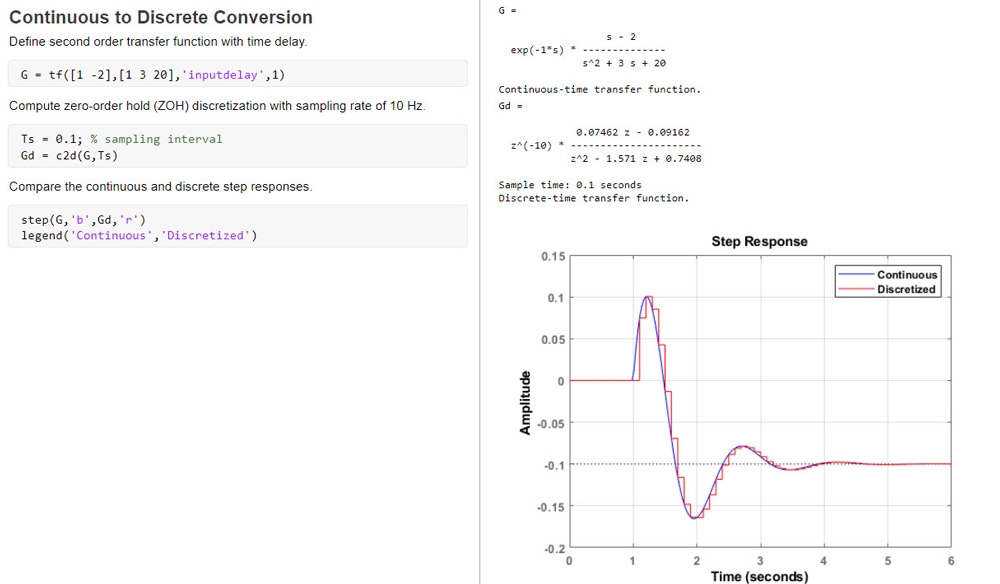
模型离散化
使用命令行功能或交互式实时编辑器任务来重新采用动态系统模型,并在连续时间和离散域之间转换模型。使用零阶保持,双线性(Tustin),零极匹配和其他速率转换方法。
探索画廊(2张图片)
模型降阶
使用模型减速器应用程序,Live Editor任务或命令行功能以交互式减少工厂或控制器模型顺序,同时保留对您的应用很重要的动态。使用平衡截断,极值零简化或模式选择技术。


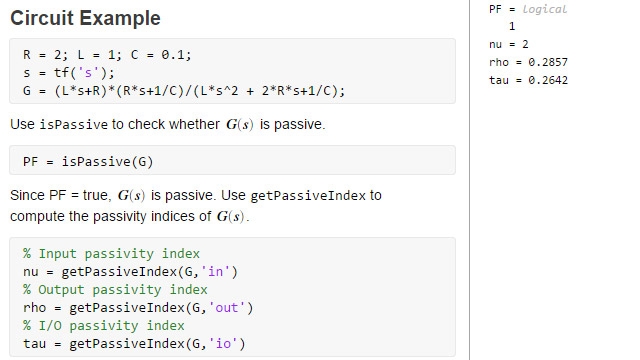
稳定性分析
计算增益裕度,相位裕度和交叉频率。用图形和数字方法检查动力系统的极点和零点位置。计算阻尼比,固有频率,和时间常数的极点的线性模型。

计算增益裕度,相位裕度和交叉频率。
探索画廊(2张图片)
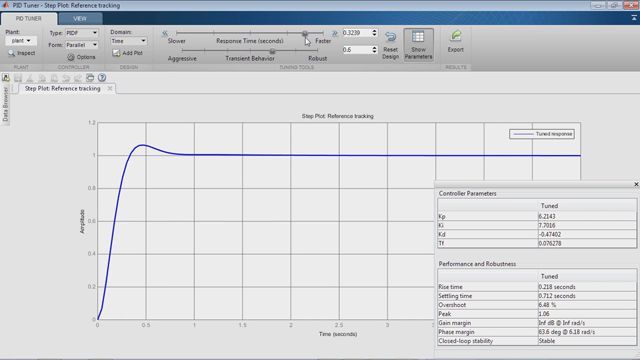
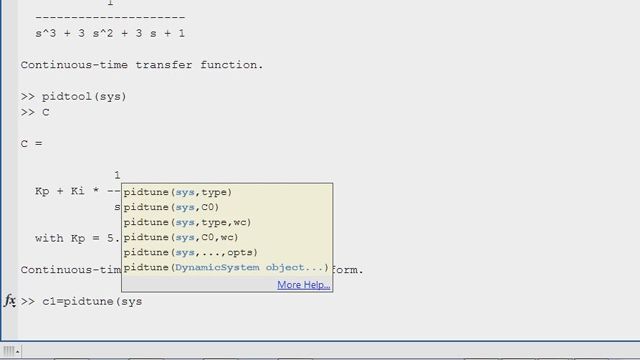
PID调优
使用PID调谐器应用程序,Live Editor任务或命令行功能自动调整PID控制器的增益以平衡性能和稳健性。指定调整参数,例如所需的响应时间和相位余量。调谐连续或离散PID控制器。
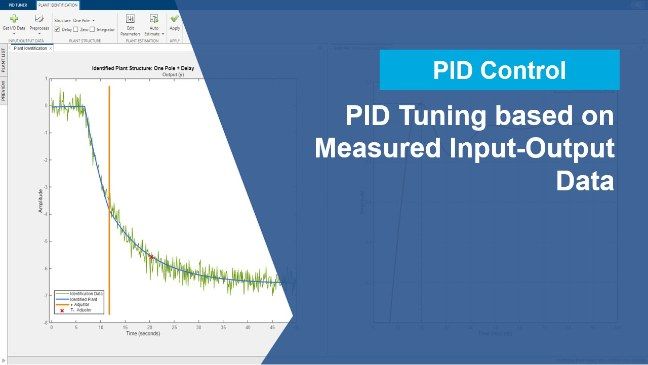
植物动态的交互估计
使用系统识别工具箱™直接在PID调谐器应用中创建从测量的输入输出数据的工厂模型。或者,使用Live Editor识别工厂动态并调整PID控制器。
二自由度PID控制
调谐自由度(2-DOF)PID控制器。使用2-DOF PID控制器而不是1-DOF PID控制器来实现更好的扰动抑制,而无需在设定点跟踪中的过冲显着增加。

在PID调谐器应用程序中调整一个二自由度PID控制器(实线)并将其与一个一自由度PID控制器(虚线)进行比较。
基于根轨迹图和波德图的交互设计
使用控制系统设计师应用程序交互设计和分析SISO控制系统。使用根轨迹、波德图和尼克尔斯图图形化地调整通用控制组件,如pid、超前/滞后网络和陷波滤波器。

闭环响应监测
使用阶跃响应、Nyquist和其他在调整控制器时动态更新的图来可视化闭环和开环响应。指定和评估时域和频域设计要求,如上升时间、最大超调量、增益裕度和相位裕度。


SISO和MIMO环
使用Control System Tuner应用程序或命令行函数来建模和调整具有简单可调谐元素的SISO或MIMO控制系统架构,如增益、PID控制器或低阶滤波器。在多回路控制系统中联合调整多个回路。

时间和频域目标
指定和可视化调谐要求,例如跟踪性能,干扰抑制,噪声放大,闭环杆位置和稳定性边距。自动调谐控制器参数以满足必须具有的要求(设计约束)并最佳地满足其余要求(目标)。

针对一组植物模型进行调优
设计一个控制器,该控制器对由于参数变化、运行条件变化以及传感器或执行器故障而导致的工厂动态变化具有鲁棒性。

设计对植物参数变化具有鲁棒性的控制器。
Simulink中的增益计划控制器万博1manbetx
在Simulink中建立增益调度控制系统模型万博1manbetx®采用了变PID控制器、变传递函数、变陷波滤波器和变低通滤波器等模块。

在Simulink中建模增益计划控制器的库。万博1manbetx
获得表面调整
自动调整增益表面系数,以满足整个系统运行包络的性能要求,并实现工作点之间的平滑过渡。说明随操作条件而变化的要求。在整个设计操作范围内验证调优结果。

LQR/LQG和极点配置
设计连续和离散线性二次调节器(LQR)和线性二次高斯(LQG)控制器。计算反馈增益矩阵以将闭环极点放置在所需的位置。

卡尔曼滤波器
设计和仿真线性稳态和时变卡尔曼滤波器。使用MATLAB Coder™和Simulink Coder™生成这些滤波器的C/ c++代码。万博1manbetx

非线性状态估计
在MATLAB中使用扩展卡尔曼滤波器、无迹卡尔曼滤波器或粒子滤波器估计非线性系统的状态®和仿真软万博1manbetx件。使用MATLAB编码器和Simulink编码器生成这些滤波器的C/ c++代码。万博1manbetx

线性分析
使用Simulink Control Design™中的线性分析万博1manbetx工具线性化Simulink模型。使用阶跃响应,脉冲响应,BODE,NICHOL,NYQUIST,奇异值和零极图计算线性化模型的时间和频率响应。

补偿器的设计
在Simulink中使用Simulink Control Design图形化地调整SISO反馈回万博1manbetx路。使用交互的Bode、根轨迹和Nichols图形编辑器设计控制器,用于添加、修改和删除控制器极点、零和增益。

补偿器调整
在Simulink中自动调整PID控制器的增益。万博1manbetx使用Simulink Control Design中的Control System Tuner应用程序或命令行工具来万博1manbetx自动调整分布在Simulink中任意数量反馈循环中的控制元素的增益和动态。

