VehicleDetectorAcf
使用聚合通道功能加载车辆探测器
描述
探测器= VehicleDetectorAcfAcFobjectDetector使用车辆前,后,左侧和右侧的未划分的图像对物体进行训练。
例子
图像中检测车辆
加载车辆的预训练检测器
检测器= vericleDetectorAcf(“前进视图”);
加载图像并运行检测器。
i = imread('Highway.png');[bboxes,分数] =检测(检测器,i);
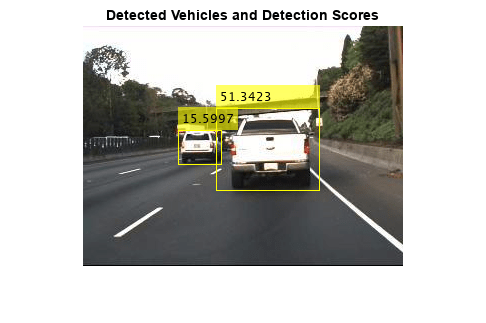
图像中检测到的车辆的覆盖边界框和分数。
i = insertObjectAnnotation(i,'长方形',bbox,分数);图IMShow(i)标题(“检测到车辆和检测得分”)
输入参数
输出参数
版本历史记录
您还可以从以下列表中选择一个网站:
美洲
- AméricaLatina(Español)
- 加拿大(英语)
- 美国(英语)