运动规划实践使用RRT算法
这个视频系列介绍流行的搜索和sampling-based运动规划算法如混合*,RRT RRT *。您将了解一个可定制的框架sampling-based规划算法如RRT工具箱™和RRT *导航。此外,该系列包括实践教程参考例子使用RRT算法在MATLAB在移动机器人和机械手等不同的应用程序。
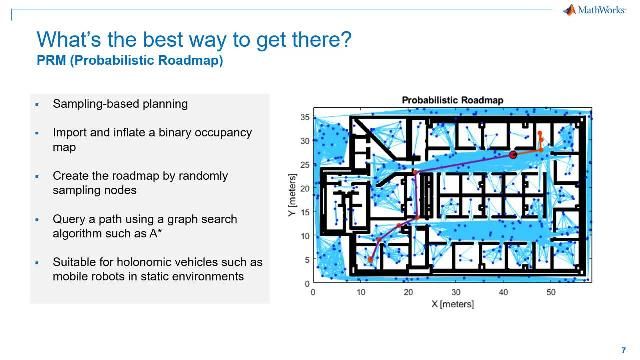
运动规划与RRT算法,第1部分:简介运动规划算法运动计划让机器人或车辆计划一个无障碍路径到给定的目标。学习一些受欢迎的运动规划算法,它们是如何工作的,他们在不同的场景中适用性。
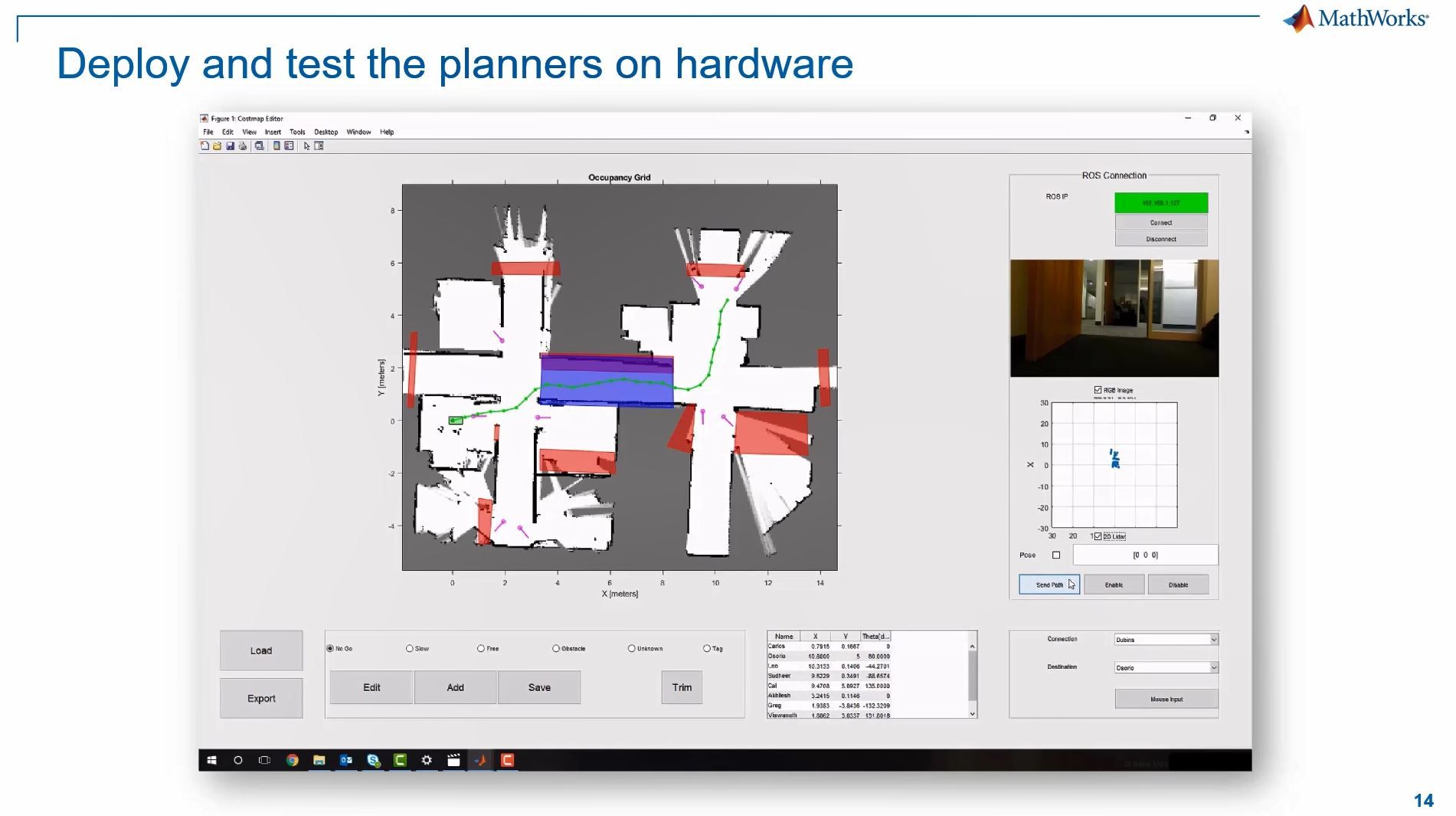
运动规划与RRT算法,第2部分:RRT算法对移动机器人学习如何使用(RRT)的快速扩展随机树算法规划路径移动机器人通过已知的地图。看如何调优规划者与自定义状态空间和运动模型。
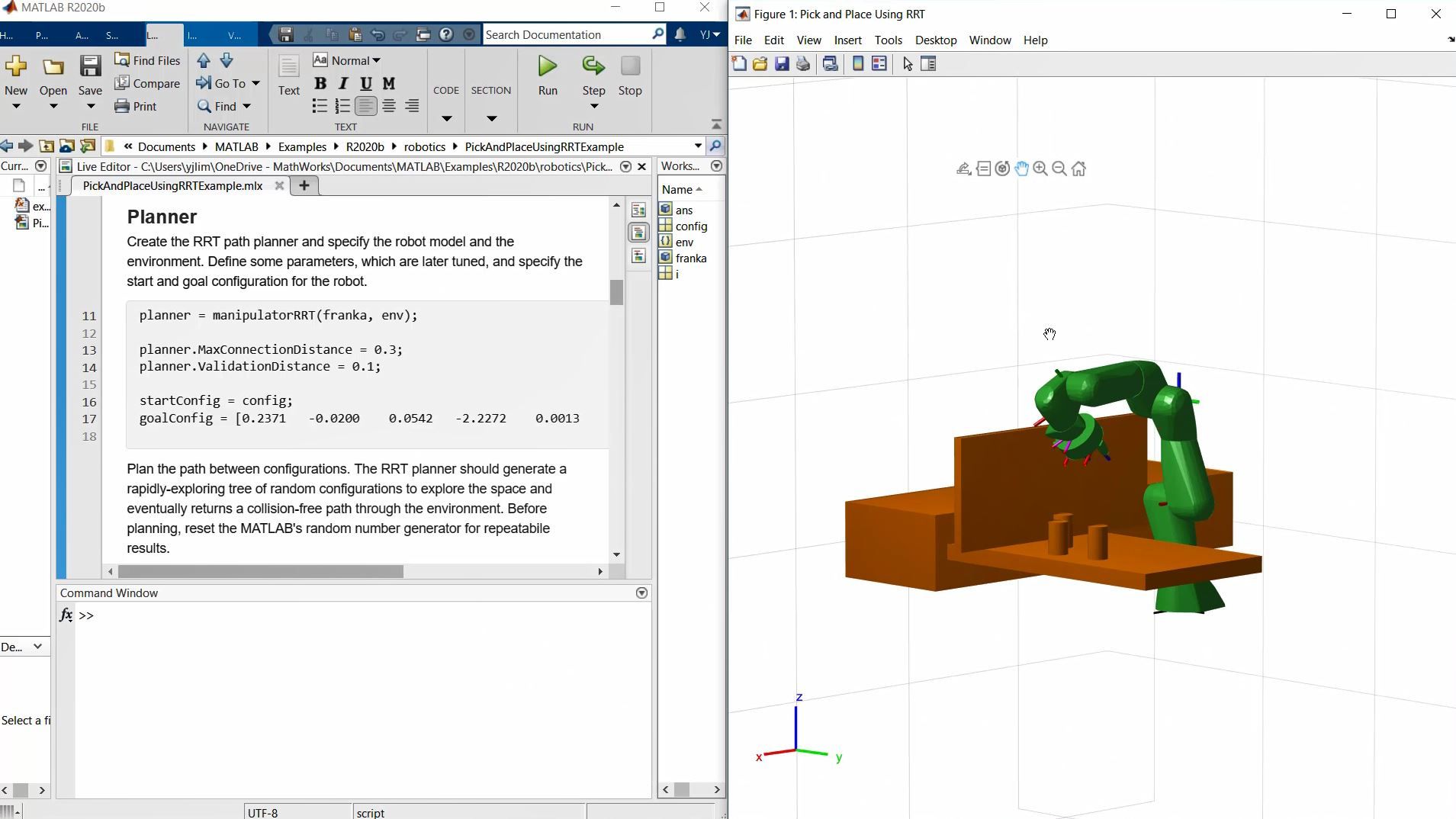
运动规划与RRT算法,第3部分:双向RRT算法机器人机械手学习(RRT)的双向快速扩展随机树算法,机器人机械手,以及如何调整一些参数来设计机器人运动规划。
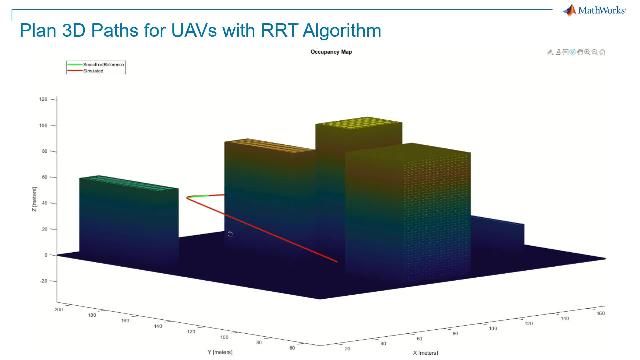
运动规划与RRT算法,第4部分:计划3 d为无人机路径学习如何使用一个可定制的RRT路径规划的路径规划模板在3 d入住率地图找到路径。使用固定翼指导模型来模拟无人机遵循计划的道路。