主要内容
。
センサーモデル
IMU, GPSおよび距離センサーのキャリブレーションとシミュレーション
加速度计,磁力计,ジャイロスコープ,高度计,gps,imuおよびおよびセンサーについて,センサーのモデリングとををし。センサーの読み取り値,センサーセンサー,环境ノイズ,环境ノイズし他。轨迹を生成しし,ワールドワールド内でのこれらのセンサーののをエミュレートししいいいいいいいいいいいいいいいいいいいいのの
关节
Allanvar. |
艾伦差异 |
马加尔 |
磁力计校准系数 |
加速 |
加速度计传感器参数 |
Gyroparams. |
陀螺仪传感器参数 |
magparams. |
磁力计传感器参数 |
オブジェクト
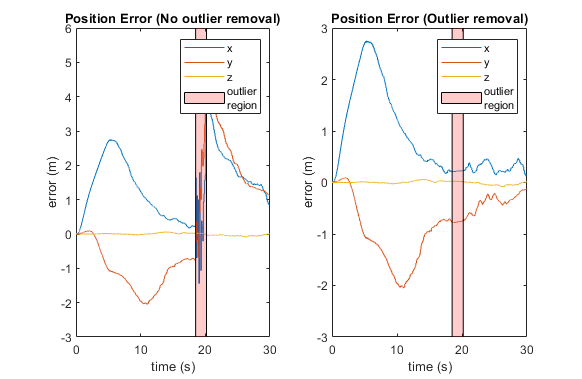
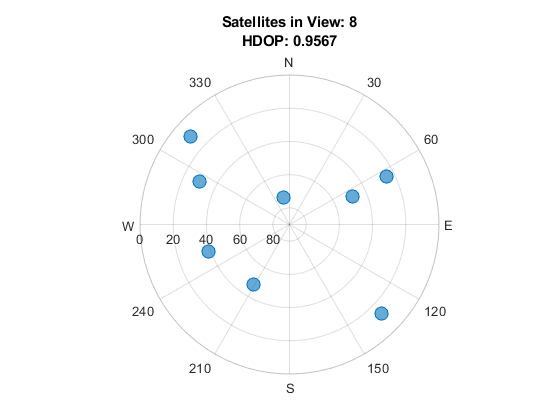
gnssSensor |
模拟GNSS生成位置和速度读数 |
高度计 |
高度计仿真模型 |
gpsSensor |
GPS接收器仿真模型 |
imusvesor. |
IMU仿真模型 |
担任者 |
惯性导航系统和GNSS/GPS仿真模型 |
rangeSensor |
模拟轴承传感器读数 |
wheelencoderunicycle. |
模拟单轮循环车辆的轮式编码器传感器读数 |
wheelEncoderBicycle |
模拟车轮编码器传感器读取自行车车辆 |
wheelencoderdifferencedrive |
模拟轮式编码器传感器读数用于差动驱动车辆 |
Wheelencoderackermann. |
为阿克曼车辆模拟车轮编码器传感器读数 |
kinematicTrajectory |
速率驱动的轨迹发生器 |
Timescope. |
显示时域信号 |
WayPointTrajectory. |
航点轨迹发生器 |
nmeaparser. |
从GNSS接收端发送的标准NMEA语句中解析数据 |
GPSDev. |
连接到一个与主机相连的GPS接收器 |
トピック
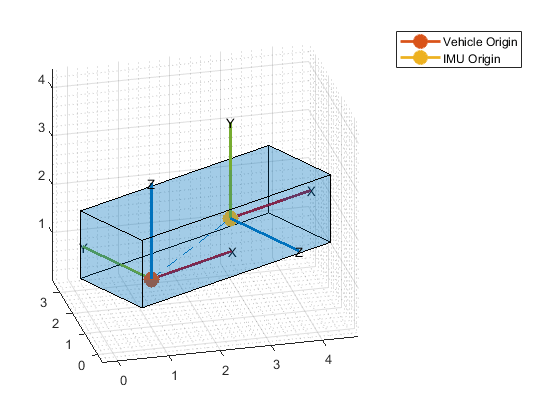
惯性传感器和GPS的模型组合
此示例显示如何使用Allan方差来确定MEMS陀螺仪的噪声参数。这些参数可用于在模拟中模拟陀螺仪。陀螺仪测量模拟为:
探索轮式编码器的各种误差源以及它们如何影响车轮内径估计。在定义地面真理轨迹后,改变车轮半径偏置的参数,车轮位置噪声,车轮滑动以及各种车轮编码器对象的轨道宽度。请注意,从滚轮编码器传感器模型中更改输出轨迹上的这些参数的影响。
此示例显示如何使用IMU使用陀螺仪偏置imufilter.。
定制Timescope.属性和使用测量工具。
注目の例


您还可以从以下列表中选择一个网站: