主要内容
。
sl
2次元および3次元の位置とマッピングの同时行
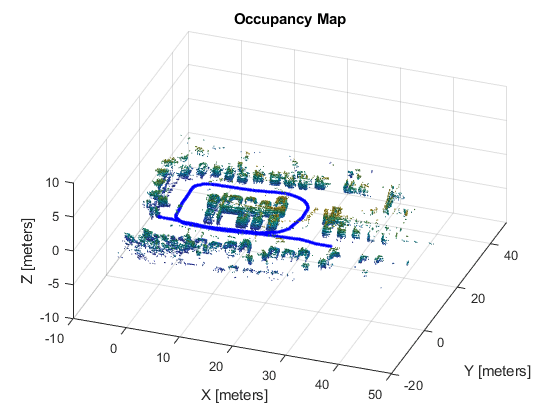
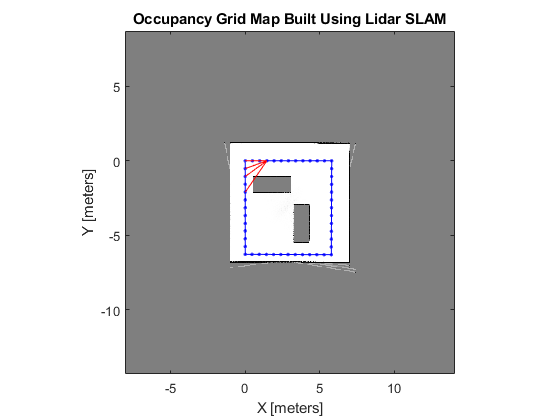
SLAM(位置推定とマッピングのの时実行)は,マッピングと位置推定と姿势推定には,Lidarslam.を使使ますます。ログログ记录されフィルターフィルターフィルターれたを受け取り,slamをを用してをマップを作物Buildmap.を使用します。Slamマップマップ.
アプリ
| Slamマップマップ. | 使用基于LIDAR的SLAM构建2-D网格图 |
オブジェクト
Lidarslam. |
LIDARスキャンを使使使用した位置推定とマッピングの行 |
姿势图 |
创建2-D姿态图 |
Posegraph3d. |
创建3-D姿态图 |
关节
Buildmap. |
从LIDAR扫描建立占用地图 |
addscan. |
将扫描添加到Lidar Slam Map |
addrelationpose |
添加相对姿势以姿态图 |
优化术照片 |
优化姿势图中的节点 |
removeloopclosures. |
从姿势图删除环形封闭 |
ScanSandpose. |
提取扫描和对应的姿势 |
注目の例

您还可以从以下列表中选择一个网站: