オブジェクト検出およびセマンティックセグメンテ,ション用の学習デ,タ
ラベル付けアプリと计算机视觉工具箱™のオブジェクトや関数を使用して,グラウンドトゥルースデータからアルゴリズムに学習させることができます。ラベル付けアプリを使用して,ビデオ,イメージシーケンス,イメージコレクション,またはカスタムデータソースのグラウンドトゥルースデータに対話形式でラベルを付けます。そして,ラベル付きデータを使用して学習データを作成し,オブジェクト検出器やセマンティックセグメンテーションネットワークに学習させます。
このワ,クフロ,は,メジラベラアプリとビデオラベラアプリのみに適用されます。自动驾驶工具箱™でグラウンドトゥルスラベラ(自动驾驶工具箱)アプリ用の学習デ,タを作成する場合は,関数gatherLabelData(自动驾驶工具箱)を使用します。
ラベル付け用デ,タの読み込み
メジラベラ-ファie浏览器ルまたは
ImageDatastoreオブジェクトからアプリに▪▪メ▪▪ジコレクションを読み込みます。ビデオラベラ—ビデオ,メジシケンス,スをアプリに読み込みます。
デ,タのラベル付けとオ,トメ,ションアルゴリズムの選択: ROIおよびシ,ンラベルをアプリ内で作成します。詳細は,次を参照してください。
メジラベラ- - - - - -イメージラベラー入門
ビデオラベラ- - - - - -ビデオラベラ,入門
組み込みのアルゴリズムのいずれか1つを選択するか,独自のカスタムアルゴリズムを作成してデータのオブジェクトにラベルを付けることができます。独自のオトメションアルゴリズムを作成する方法にいては,ラベル付け用オ,トメ,ションアルゴリズムの作成を参照してください。
ラベルのエクスポ,ト:データのラベル付けの後に,ラベルをワークスペースにエクスポートするか,それらをファイルに保存できます。ラベルは
groundTruthオブジェクトとしてエクスポ,トされます。データソースが複数のイメージコレクションから構成されている場合,イメージコレクションのセット全体にラベルを付けて,groundTruthオブジェクトの配列を取得します。groundTruthオブジェクトの共有の詳細にいては,ラベル付きのグラウンドトゥル,スデ,タの共有と保存を参照してください。学習デ,タの作成:
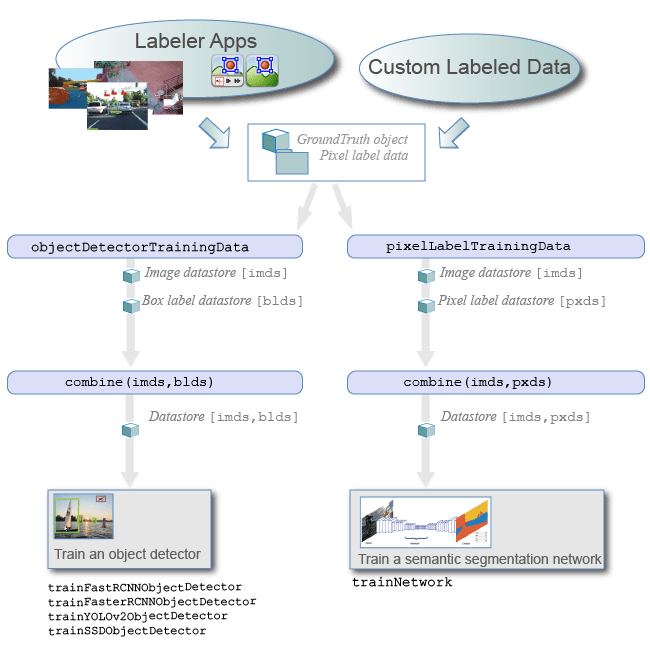
groundTruthオブジェクトから学習デ,タを作成するには,次の関数のいずれかを使用します。オブジェクト検出器用の学習デタ—関数
objectDetectorTrainingDataを使用します。セマンティックセグメンテションネットワク用の学習デタ—関数
pixelLabelTrainingDataを使用します。
ビデオファルまたはカスタムデタソスを使用して作成したオブジェクトの場合,関数
objectDetectorTrainingDataおよびpixelLabelTrainingDataが▪▪メ▪▪ジをgroundTruthのディスクに書き込みます。サンプリング係数を指定して,グラウンドトゥル,スデ,タをサンプリングします。サンプリングによって,類似のサンプルの使用によるオブジェクト検出器の過学習が軽減されます。アルゴリズムの学習:
オブジェクト検出器——いくつかの计算机视觉工具箱オブジェクト検出器の1つを使用します。検出器の一覧にいては,オブジェクトの検出を参照してください。自動運転に固有のオブジェクト検出器にいては,视觉感知(自动驾驶工具箱)にリストされている自动驾驶工具箱のオブジェクト検出器を参照してください。
セマンティックセグメンテーションネットワーク——セマンティックセグメンテーションネットワークの学習の詳細については,深層学習を使用したセマンティックセグメンテ,ション入門を参照してください。
参考
アプリ
関数
semanticseg|objectDetectorTrainingData|trainRCNNObjectDetector|trainRCNNObjectDetector|trainFasterRCNNObjectDetector|trainACFObjectDetector|trainYOLOv2ObjectDetector|trainSSDObjectDetector|pixelLabelTrainingData
オブジェクト
関連するトピック
您也可以从以下列表中选择一个网站: