빠른기준추종을위한pid제어기설계
이예제에서는Pid조정기를사용하여다음플랜트에대한제어기를설계하는방법을보여줍니다。
설계요구사항은폐루프시스템1.5초이보다적은상승시간6초과보다적은정착시간으로기준입력을추종하는것입니다。
이예제에서는플랜트를Lti모델로@ @현하겠습니다。Pid조정기를사용하여Si万博1manbetxmulink®모델의PID控制器블록을조정하는방법에대한자세한내용은调整PID控制器,以支持参考跟踪或干扰抑制(万博1manbetxSimulink控制设计)항목을참조하십시오。
플랜트모델을만들고Pid조정기를열어서첫번째통과설계에대한PI제어기를설계합니다。
Sys = zpk([],[-1 -1 -1],1);pidTuner (sys,“π”)
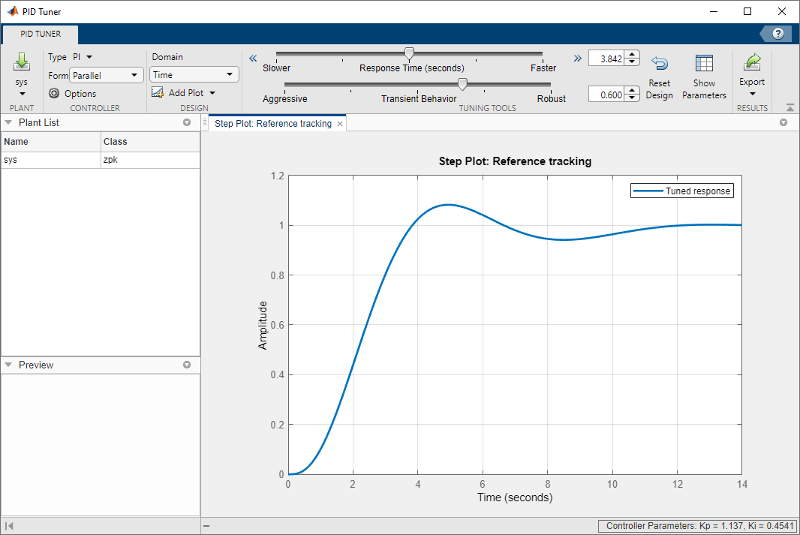
Pid조정기를열면PID조정기가사용자가지정한유형(여기서는π로지정)의제어기를자동으로설계합니다。제어기는성능(응답시간)과강성(정성여유)사이의균형을맞추도록설계됩니다。Pid조정기에서설계된제어기를사용하여시스템의폐루프계단응답을@ @시합니다。
팁
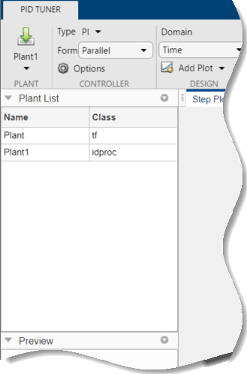
Pid조정기는MATLAB®데스크탑의앱탭에서열수도있습니다。그럴 경우Pid조정기의플랜트메뉴를사용하여플랜트모델을지정하십시오。
기준추종상승시간과정착시간을검토합니다。
플롯을마우스오른쪽버튼으로클릭하고
특성>상승시간을선택하여플롯위에상승시간을파란색점으로@ @시합니다。특성>정착시간을선택하여정착시간을@ @시합니다。숫자형값을포함한툴팁을보려면각각의파란색점을클릭하십시오。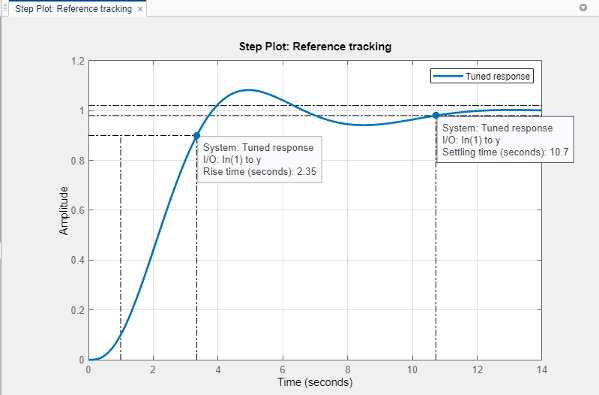
PI제어기초기설계에서상승시간은2.35초이고정착시간은10.7초입니다。두결과모두설계구사항보다느립니다。
참고
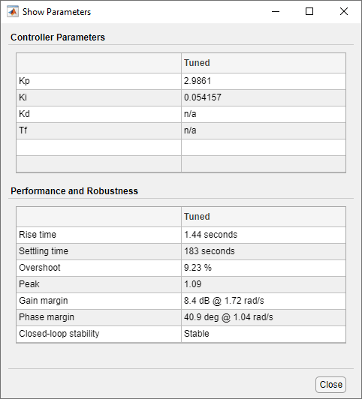
성능메트릭을플롯상의툴팁이아닌` ` `로` ` ` `시하려면파라미터@ @시를클릭하십시오。그러면성능및강성메트릭과조정된제어기이득값을시하는가열립니다。
응답 시간슬라이더를오른쪽으로밀어서루프성능을높여봅니다。응답플롯이자동으로새설계로업데이트됩니다。

1.5초미만의상승시간구사항이충족될때까지응답 시간슬라이더를움직이면더많은진동이발생합니다。또한파라미터표에나타나는새로운응답이용인할수없을정도로긴정착시간을갖게되었음을알수있습니다。
더빠른응답속도를달성하려면알고리즘에서정성이희생되어야합니다。
응답을개선하기위해제어기유형을변경합니다。
제어기에미분동작을추가하면Pid조정기가더높은자유도를가지고적절한위상여유를원하는응답속도로달성할수있습니다。
유형메뉴에서
PIDF를선택합니다。Pid조정기가새pidf제어기를설계합니다。(사용가능한제어기유형에대한자세한내용은Pid제어기유형항목을참조하십시오。)
이제상승시간과정착시간이설계구사항을충족합니다。응답 시간슬라이더를사용하여응답을추가로조정할수있습니다。디폴트자동조정결과로되돌리려면설계재설정을클릭하십시오。
참고
응답시간대신폐루프대역폭을조정하려면설계 모드메뉴에서
频域을선택하십시오。대역폭은응답시간에반비례합니다。필하다면다른시스템응답을분석합니다。
다른시스템응답을분석하려면플롯 추가를클릭하십시오。분석할시스템응답을선택합니다。

예를들어,플랜트입력에서외란에대한폐루프계단응답을관측하려면플롯 추가메뉴의계단섹션에서
输入干扰抑制을선택합니다。외란제거응답이새图에나타납니다。
사용가능한응답플롯에대한자세한내용은Pid조정기에서설계분석하기항목을참조하십시오。
팁
Pid조정기에서여러개의플롯이@ @시되는방식을변경하려면보기탭의옵션을사용하십시오。
제어기설계를matlab작업공간으로내보냅니다。
최종제어기설계를matlab작업공간으로내보내려면
 내보내기를클릭하십시오。Pid조정기가제어기를다음제어기객체로내보냅니다。
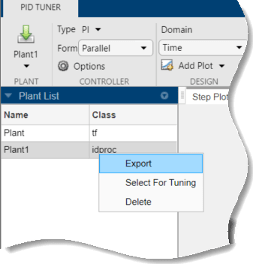
내보내기를클릭하십시오。Pid조정기가제어기를다음제어기객체로내보냅니다。또는데이터브라우저에서마우스오른쪽버튼으로클릭하여표시되는메뉴를사용하여모델을내보낼수도있습니다。이렇게하려면데이터브라우저탭을클릭하십시오。
그런다음모델을마우스오른쪽버튼으로클릭하고내보내기를선택합니다。










관련 항목
您也可以从以下列表中选择一个网站: