自动化驾驶工具箱
ADAS및자율주행시스템,시뮬레이션및및
自动驾驶工具箱™는adas와자율주행설계,시뮬레이션및및테스트를위한알고리즘툴툴을제공위한알고리즘툴을을제공비전과lidar인식시스템뿐만아니라센서융합융합,경로계획및차량제어기를설계테스트할수。시각화툴에는센서커버리지,감지감지추적및비디오,lidar및지도표시를위한조감도범위가포함됩니다포함。이툴박스를사용하면在这里HD Live Map아이터와娱乐®도로망을가져와서작업할수있습니다。
地面真相贴标앱을사용하면地面实测의레이블지정을자동화하여인식알고리즘을학습하고평가할수있습니다。HIL(硬件在半实物)테스팅및인식,센서융합,경로계획,제어로직의데스크탑시뮬레이션을위해,주행시나리오를생성하고시뮬레이션할수있습니다。사진같은3차원환경에서카메라,레이더,LIDAR센서출력을시뮬레이션하고물체및차선경계선을감지하는센서를2.5차원시뮬레이션환경에서시뮬레이션할수있습니다。
自动驾驶的工具箱는전방충돌경고,자율긴급제동,적응순항제어,차선유지보조,주차대행등일반적인ADAS기능과자율주행기능의참조응용예제를제공합니다。이툴박스는센서융합,추적,경로계획및차량컨트롤러알고리즘을지원하여신속한프로토타이핑과HIL테스트를위한C / C ++코드생성을지원합니다。
시작하기:


시각적인식시스템참조어플리케이션에서에서차량차량과차선감지감지감지감지감지
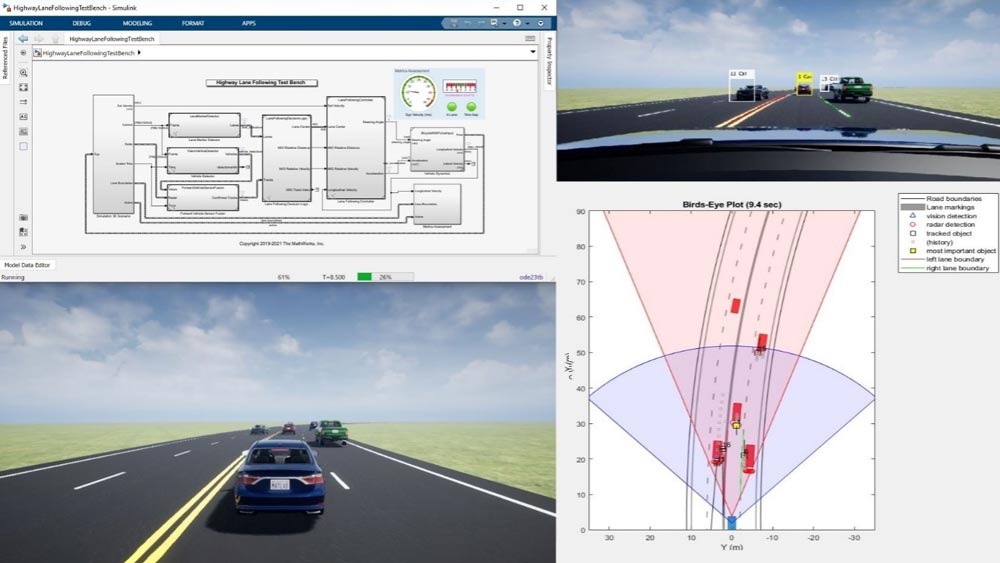
입방체주행시뮬레이션
레이더및카메라센서에서가상의의감지결과결과생성하고그러한감지결과를주행시나리오통합시켜시켜시켜시켜시켜시켜통합시켜통합시뮬통합통합통합통합통합통합시켜시켜통합시켜통합시켜시켜통합통합통합통합驾驶场景设计师앱을사용하여하여,액터및센서를정의。미리만들어진欧元ncap테스트와opendrive도로망을가져옵니다。

虚幻引擎주행시나리오시뮬레이션
史诗般的游戏®의虚幻引擎®을이용하여랜더링한3차원시뮬레이션환경에서주행알고리즘의성능을개발,테스트,시각화하십시오。

3차원시뮬레이션환경을이용가상가상데이터를를기록하고차선마커감지을개발하며하며개발개발하며테스트테스트테스트테스트테스트테스트테스트테스트테스트테스트테스트
자동地面真理标签
대화형자동地面真相标签을을地面真相贴标牌앱을이용하여손쉽게물체,의미론적분할,장면분류를하십시오。


지상실측자료와비교하여차선감지출력을평가

단안카메라센서시뮬레이션출력。


这里HD Live Map데이터에에
在这里HD Live Map웹서비스에서상세한도로,차선및현지정보를포함타일식지도계층을지도데이터를를。

这里HD Live Map Data를이용하여차선구성을하십시오하십시오。
지도데이터시각화
스트리밍좌표를사용하여하여운행중차량의위치를매핑

스트리밍맵데이터표시。

3차원환경에서의주행경로과시각화
