ROS工具箱
ROS기반응용프로그램의설계,시뮬레이션및배포
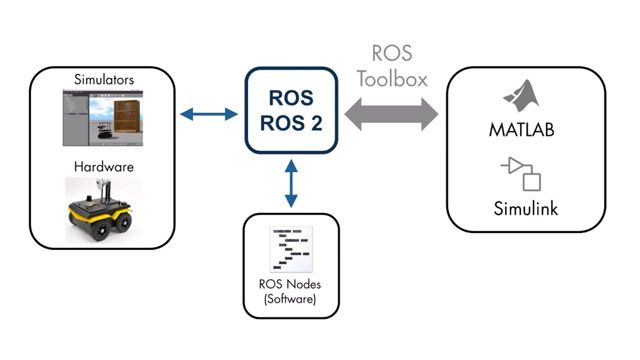
ROS MATLAB工具箱는®및仿万博1manbetx真软件®와机器人操作系统(ROS및ROS 2)을연결하는인터페이스를제공하여,ROS노드로구성된네트워크를만들수있습니다。이툴박스에는rosbag파일에기록된ROS데이터를가져오고분석하고재생하기위MATLAB함한수와仿真软件블록이있습니다。万博1manbetx또한라이브ROS네트워크에접속하여ROS메시지에액세스할수있습니다。
이툴박스를이용하면데스크탑시뮬레이션을통해,그리고露台와같은외부로봇시뮬레이터에연결하여ROS노드를검증할수있습니다。ROS工具箱는c++코드생성을지원하기때문에(MATLAB编码器™및万博1manbetx仿真软件编码器™사용),仿万博1manbetx真软件모델에서ROS노드를자동으로생성하고,시뮬레이션환경의하드웨어또는물리적하드웨어에배포할수있게됩니다。万博1manbetx仿真软件외부모드를지원하므로,하드웨어에서모델이실행되는중에메시지를열람하고파라미터를변경할수있습니다。
시작하기:
ROS네트워크연결
ROS또는ROS 2네트워크에연결하고탐색할수있습니다。내부탐색을통해,제공된주제와형식을나열하십시오。상세한ROS메시지구조를볼수습니다。

ROS네트워크에연결하기

게시자와구독자
发布-订阅시멘틱主题을의이용하여ROS또는ROS 2메시지를송수신할수있습니다。

센서데이터를구독하고바퀴속도를게시하기위한仿真软件모델万博1manbetx
서비스와동작
클라이언트-서버아키텍처를이용하여요청을전송하고작업을수행하며ROS응용프로그램에서피드백을받을수있습니다。

ROS서비스와동작을이용한클라이언트-서버상호작용
파라미터서버
ROS파라미터서버를이용하여다수의노드에관한구성옵션을저장하여노드의동적인속성변경이가능합니다。

ROS파라미터를쿼리하고설정하여차량기어선택을제어하는仿真软件모델万博1manbetx
ROS로그파일(rosbag)
rosbag파일을가져와서로깅된데이터를필터링,시각화,분석이가능합ㄴ디ㅏ。

rosbag파일에서ROS데이터를선택하기위한워크플로
내장메시지
ROS응용프로그램에지원되는ROS메시지패키지라이브러리를사용할수있습니다。

지원되는ROS메시지예
사용자지정메시지
사용자지정메시지지원을활용하여ROS또는ROS 2응용프로그램에새로운메시지형식을추가할수있습니다。

ROS 2사용자지정메시지생성하기
노드생성
ROS또는ROS 2기능을활용하는독립형응용프로그램을위한c++코드를생성할수있습니다。

万博1manbetx仿真软件에서독립형ROS 2노드를생성합니다。갤러리살펴보기(6개이미지)

ROS기반시뮬레이터에서주행하는로봇을제어하기위한仿真软件모델万博1manbetx