主要内容
特征检测与提取
图像配准、兴趣点检测、特征描述符提取、点特征匹配、图像检索
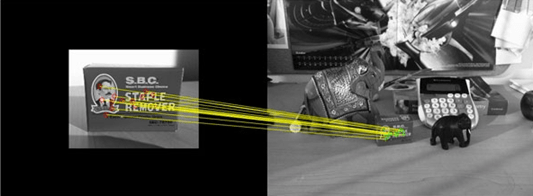
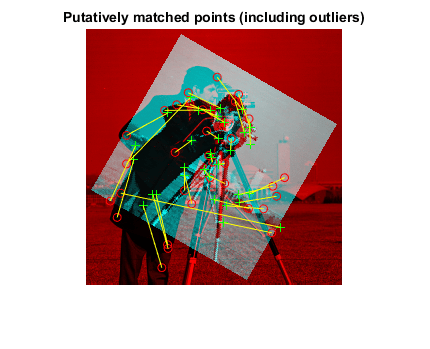
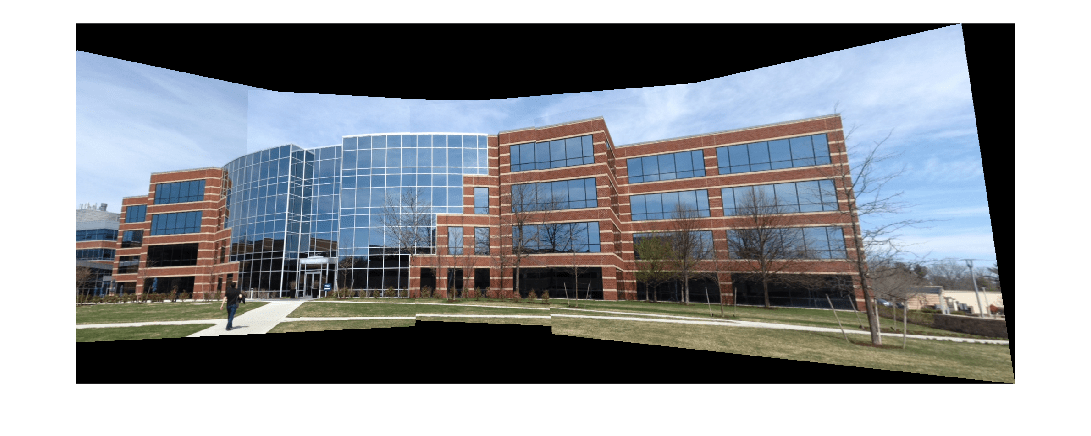
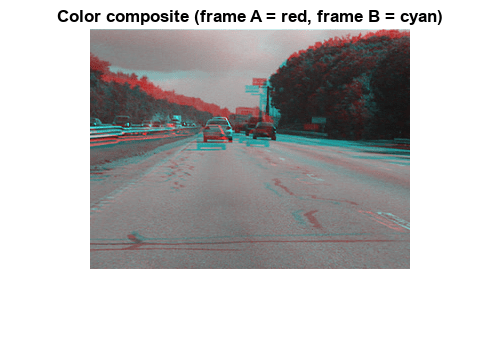
局部特征及其描述符是许多计算机视觉算法的基石。它们的应用包括图像配准、目标检测和分类、跟踪、运动估计和基于内容的图像检索(CBIR)。这些算法使用局部特征来更好地处理尺度变化、旋转和遮挡。计算机视觉工具箱™算法包括FAST、Harris和Shi & Tomasi角点检测器,以及SIFT、SURF、KAZE和MSER斑点检测器。工具箱包括SIFT、SURF、FREAK、BRISK、LBP、ORB和HOG描述符。您可以根据应用程序的需求混合和匹配检测器和描述符。
功能
主题
特色的例子





你也可以从以下列表中选择一个网站:
