自动化驾驶工具箱
Diseño,SimulaciónyPruebasde Sistemas de Asistencia Avanzada A LaConducción(Adas)Y deConducciónAutónoma
自动化驾驶工具箱™Alporitmos Y Herramientas ParaDiseñar,Simular Y Probar Sistemas de Asistencia Avanzada A LaConducción(ADAS)Y deConducciónAutónoma。ES PosibleDiseñarY Probar Sistemas dePercepcióndeVisiónyLidar,AsíCodoConadoresdeFusióndeSensores,PlanificacióndeTraycorisYvevículos。Entre Las Herramientas deVisualizaciónestán联合国Diagna y un Visor de VistaAéreadeCoberturade Los Sensores,Detecciones Y Seguimientos,AsíComoVisualizacionesParaVídeo,Lidar Y Mapas。La Toolbox Permite Importar Datos De Han Live Map Y Redes de Carreteras de Opendrive®网址:así como trabajar con ello。
中间应用地面真相标签,可能自动遵守validación(地面真相)的规则,并对percepción的算法进行评估。Para pruebas hardware-in-the-loop (HIL) y simulación de escritorio de percepción, fusión de sensors, planificación de trayectorias y lógica de control,在conducción的一般类似场景。e可能的类似于cámara的传感器,雷达和激光雷达的3D fotorrealista, así como探测对象的中间传感器límites de carril en entorno de simulación 2.5D。
自动驾驶工具箱Proporciona ejegros deaplicacióndeferenciapara funcionalsades saac y deconducciónutecuentes,tales como baderencia deColisiónfrantal,Frenado de Hardenciaautónomo,Crondo Crucero Adaptivo,Asistencia de Mantaciento de Carril Y EstacionamientoAutónomo。Esta Toolbox Soporta LaGeneracióndeCódigoC/ C ++ Para El ProtipadoRápidoYLASPruebas Hil,Y Acmite Algoritmos De Control deFusióndeSensores,Seguimiento,PlanificacióndeRaycontiasyVaTayculos。
MásfiginaCión:
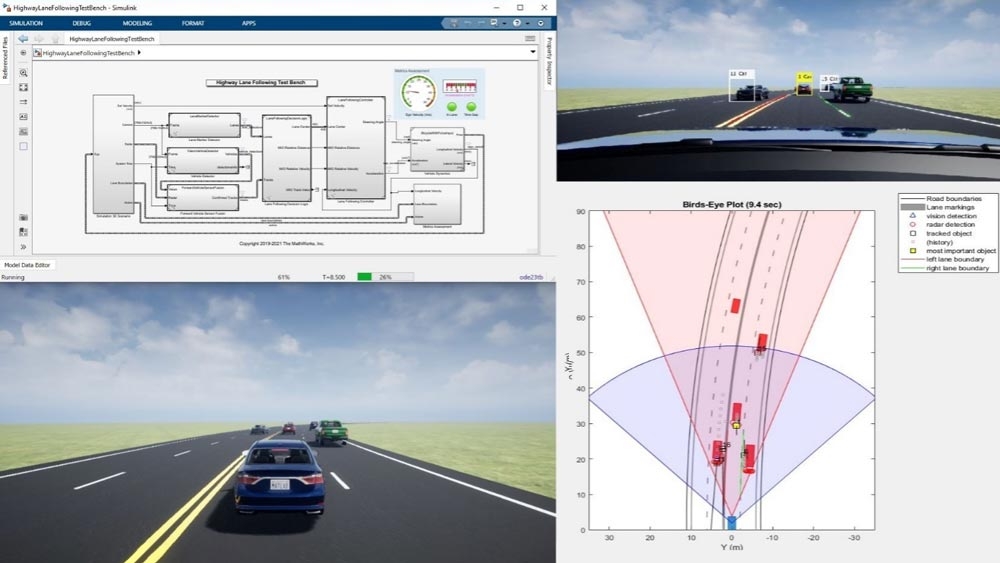


Deteccióndevevículosy carrites en laaplicacióndeferenciadel sistema depercepción视觉。
SimulacióndeConducciónCuboide
Genere DeteccionesSintéticasAParirdeMockosde Sensores de RadarYCámara,E Incorpore esas eSas eSas Detecciones en Escenarios deConducciónpara probarlos algoritmos deconducciónutónomacon uni simulador basado en comoides。Defina Redes de Carreteras,Sactores Y Sensores Mediante La App Drive Scenario设计师。Importe Pruebas de Eureorcap Y Redes de Carreteras de OpendrivePrediseñadas。

SimulacióndeCocenariosdeConduccióndevenemlien
Desarrolle,Pruebe Y Visualice El Rendimiento de los Algoritmos deConducciónNen联合国Enn Un Entorno deSimulación3D Generado Mediante虚幻引擎®de Epic Games.®。

Usando un entorno de simulación 3D para registrar datos de sensors sintéticos, desarrolle un sistema de detección de señalización de carriles y pruebe ese sistema en不同的场景。
Automatización del etiquetado de validación(地面真相)
利用洛杉矶应用地面真理贴标贴标贴埃尔吉罗斯互联网互动yiomatizado a fin de facilitar ladeteccióndeobjetos,lasegmentaciónsemánticay laclasificaciónde escenas。

Pruebas de Algoritmos dePercepción
evalúeel rendimiento de los algoritmos depercepciónmediante lacompacióndelosdeys deValidación(地面真理)Con Las Salidas de Los Algoritmos。
.")
EvaluacióndeaaldcióndeCarrilesdeCarilesdeCarlersCon Actions DeValidación(地面真理)。
diseñode sistemas deVisión
Desarrolle Algoritmos deVisión人造Para LaDeteccióndeverículosy涂料,LaDeteccióndeCarrilesY LaClasificación。

Salida de la simulación de un sensor de cámara single -目镜。
procesamiento de lidar.
利用Datos de Lidar Para Detectar Themmentar Los Planos de Tierra。


Acceso A Datos De Hat HD Live Map
Lea Los Datos de Mapas del Servicio网页HD HD Live地图,包括Las Capas de Mapas En Mosaico Que ContienenInformióndalladaSobreCarreteras,Carres YUbicación。

Uso de here HD Live Map Para Verificar Las Configuraciones de Carriles。
Visualizacióndeatosde mapas
ilitise coordenadas de Streaming para mapear las posiciones de losvehículos梅兰·塞尔瓦斯。

Visualizacióndedeosde mapas en流。

PlanificaciónyVisualizacióndeLaTayectoriadeConducciónNen联合国Entorno 3D

Controlador横向斯坦利Para CalcularLosÁngulosde Giro。