你有没有注意到控制工程师真的很喜欢三个字母的首字母缩写?在本系列中,我们将关注MPC,它可能是一些工程师最流行的控件。但它真正代表的是模型预测控制。在这段视频中,我们将讨论使用它的原因。但首先,让我们简单地看看MPC背后的基本思想。MPC是一种反馈控制算法,它使用一个模型来预测过程的未来输出。
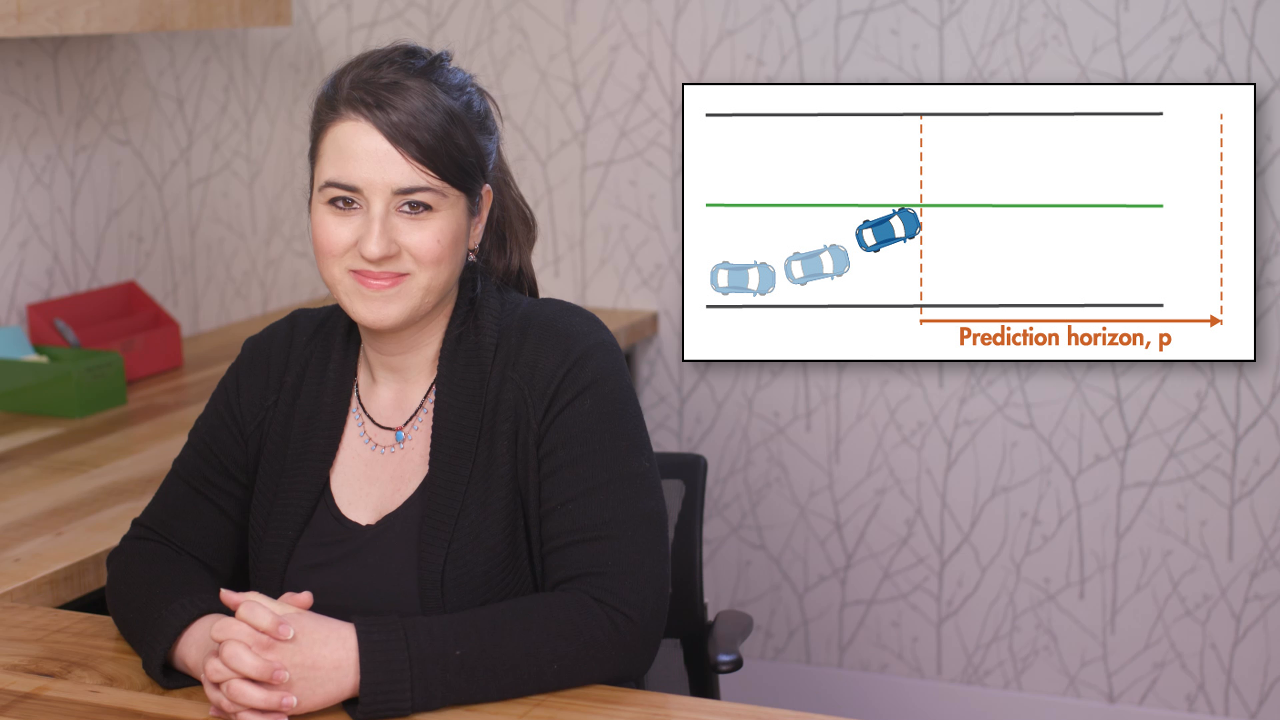
这里有一个类比来解释我们的意思:假设你正在开车,你的目标是把车保持在车道内。您为实现这一目标所做的决策与模型预测控制器的工作方式非常相似。你知道你的车的特点:它的速度或转弯多少取决于你采取的控制行动。使用这个汽车模型,你可以在脑海中进行模拟。根据你选择的控制动作,你可以预测未来的轨迹。然后选择最优动作,使预测轨迹尽可能接近预期轨迹。这是一个简单的例子,让你了解大概的概念,但在下一个视频中,我们将更详细地讨论MPC是如何工作的。
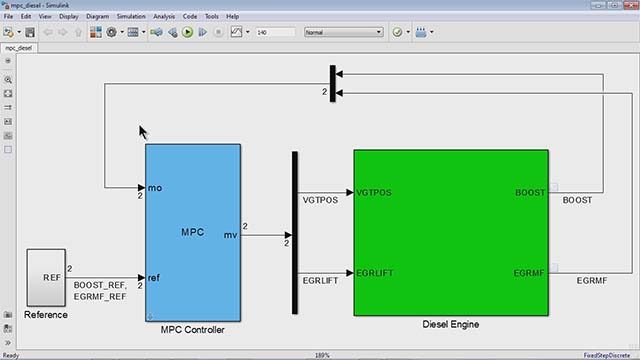
以下是使用模型预测控制的一些原因。MPC可以处理多输入多输出系统,它们的输入和输出之间可能有交互。例如,在这个MIMO系统中,第二个输出的变化也会影响第一个输出。如果我们使用PID控制器,设计它们将是具有挑战性的,因为两个控制回路将相互独立地运行,就像两个回路之间没有交互一样。设计更大的系统将更具挑战性,因为它们将需要调优太多的控制器增益。MPC的优点是它是一个多变量控制器,通过考虑所有系统变量之间的相互作用,同时控制输出。MPC的另一个优点是它可以处理约束。约束很重要,因为违反约束会导致不希望的结果。例如,驾驶时的一些安全约束是汽车必须遵守速度限制,并与其他汽车保持安全距离。此外,由于汽车的物理限制,比如加速度限制,也存在一些限制。 If this was an autonomous car controlled by MPC, the controller would track a desired trajectory while satisfying all these constraints.
MPC的另一个特点是它的预览功能,类似于前馈控制。假设自动驾驶汽车行驶在弯曲的道路上。如果控制器不知道前面有弯道,它只能在转弯时刹车。然而,如果汽车前面有一个摄像头,提供未来轨迹的信息,控制器将提前知道即将到来的弯道。因此,它可以更快地刹车,安全地呆在车道上。MPC可以很容易地将未来的参考信息纳入控制问题,以提高控制器的性能。
自20世纪80年代以来,模型预测控制器一直被应用于过程工业。随着微处理器计算能力的提高,它们的应用也扩展到其他领域。这里列出了其中一些领域。
MPC具有所有这些优点,但需要注意的是,它需要一个功能强大、速度快、内存大的处理器。原因是MPC在每个时间步骤都解决了一个在线优化问题,我们会在下个视频中详细讨论。
综上所述,MPC利用系统的模型来预测其未来的行为,并解决了在线优化算法来选择最佳的控制动作,从而将预测的输出驱动到参考。它可以控制多输入多输出系统,在输入和输出之间可能有交互作用。MPC可以处理约束,它有预览功能。它也被广泛应用于许多行业。在下一个视频中,我们将讨论模型预测控制器是如何工作的。