你好,
我想做姿势估计使用的传感器融合
insfilterMARG
过滤器。我有点后的结构
例子
,我有一个IMU对象来模拟传感器(加速度计、陀螺仪和磁强计)值。我直接使用的GPS信号米中的值(加上一些添加噪声)的轨迹,它来自一个waypointtrajectory(连同取向)。
卡尔曼循环看起来像这样:
ori_est =四元数();
pos_est = 0 (n, 3);
stateIdx = stateinfo(保险丝);
为2 = 1:n
fuse.predict (acc (ii):),双向场致发光(ii):));
fuse.fusemag (mag (ii):), Rmag);
正确的(stateIdx保险丝。位置,pos(二世:)、橡胶操作);
[pos_est (ii:), ori_est (ii):)] =姿势(保险丝);
结束
这个过滤器的性能相当好后理想的传感器(没有声音)和手动调整过程噪声值在不同的价值观和评价结果。使用优化函数导致没有成功(即使对于简单模型)到目前为止,所以手动找到的值是唯一的选择。然而当模拟现实环境中噪声的传感器读取,这些过程噪声值变得更加重要,手动,很难找到最优的组合。
sensor_data =表(acc、游客、杂志、pos、南(大小(acc)),“VariableNames”,{加速度计的,“陀螺”,“磁强计”,…
“GPSPosition”,“GPSVelocity”});
g_truth =表(ori_true pos_true、vel_true repmat (magfieldNED n 1), 0 (n, 3), 0 (n, 3), 0 (n, 3),…
“VariableNames”,{“定位”,“位置”,“速度”,“GeomagneticFieldVector”,…
“DeltaAngleBias”,“DeltaVelocityBias”,“MagnetometerBias”});
measurenoise = tunernoise (“insfilterMARG”);
调整(熔断器、measurenoise sensor_data g_truth);
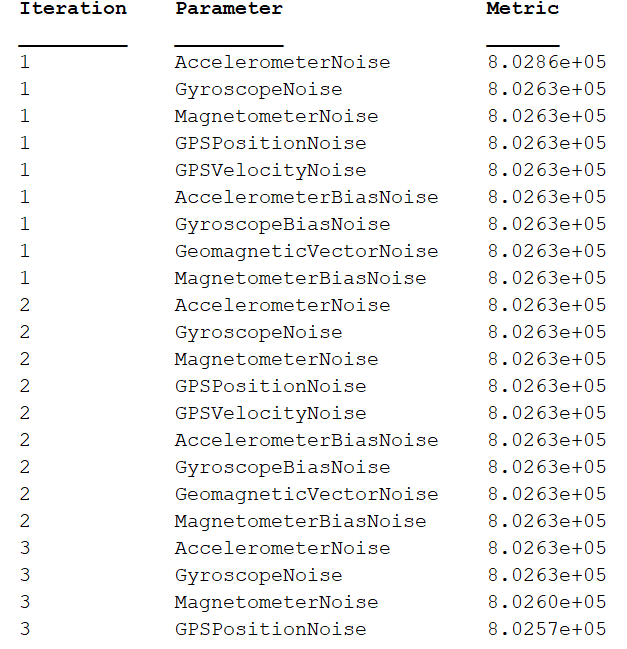
调函数不收敛(我试着添加更多的迭代和改变步骤向前和向后值配置对象。调函数的输出如下:
它结束后方向估计是无法使用,甚至比手动找到接近最优值,这还不够好。
这是预期的行为吗?还是我的理解有任何错误/代码?我可以发布代码的其余部分如果需要。
提前谢谢。