我试过几种不同的IMU过滤器中可用传感器融合MATLAB工具箱,发现他们不返回相同的回答每次尽管被给予相同的数据和实现之间没有设置被改变了,有人知道这是为什么吗?
过滤器/融合方法我有问题是:complementaryFilter ahrsfilter, imufilter
我测试了它们的方式(注意一个问题,我正在研究一个更大的部分代码)例如:
保险丝= complementaryFilter (SampleRate, 248.0159)
[complementary1, ~] =保险丝(IMU (1) .acc, IMU (1) .gyro, IMU (1) .mag);
[complementary2, ~] =保险丝(IMU (1) .acc, IMU (1) .gyro, IMU (1) .mag);
complementary1 = = complementary2;
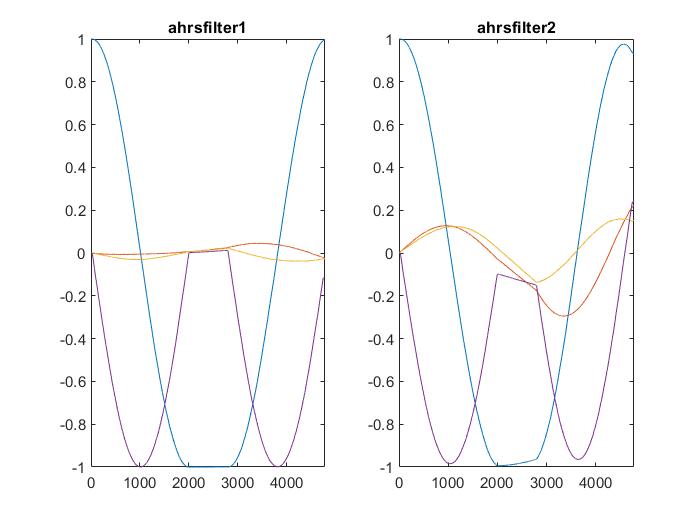
人物,情节(ans)
IMU (1)。acc, IMU (1)。陀螺和IMU (1)。镁是加速度计、陀螺仪和磁强计值保存在一个结构体。从这个对比的答案是0。我测试了它与另外两个过滤器我也使用和俺们是1。这些过滤器/融合方法一致是ecompass(也可用的传感器融合工具箱)和开源Madgwick过滤器。我想明白为什么答案是不同的每一次这三个过滤器