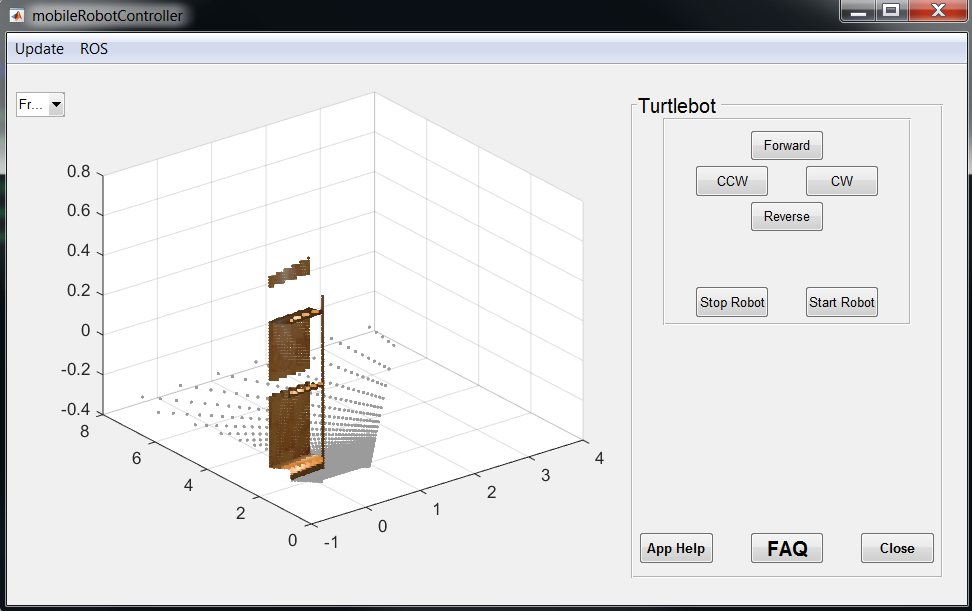
这个应用程序被设计用来控制带有ROS界面的Turtlebot。该应用程序由三个类组成:1)kinectViewer, 2) closeloopturtle,和3)mobileRobotController。
主要的应用类是mobileRobotController,这个类依赖kinectViewer来显示3D传感器数据,依赖closeloopturtle来处理Turtlebot的闭环控制。该控制器是一个简单的'P'控制器,它依赖于机器人的车轮编码器。
你可以通过下拉菜单在模拟和物理硬件之间动态切换。
引用作为
MathWorks学生竞赛团队(2021年)。移动机器人控制器(//www.tianjin-qmedu.com/matlabcentral/fileexchange/53564-mobile-robot-controller), MATLAB中央文件交换。检索.
MATLAB版本兼容性
创建R2015b
与任何版本兼容