
立体几何库工具箱:创建表面模型,导出3D打印,从cad系统导入,机器人,机构

联系力量的例子和库。

软、刚性和混合机器人系统的统一仿真和分析平台


电驱动四足机器人模型,包括步态分析和设计工作流程。

机器人模型库,用MATLAB和Simulink可视化和仿真机器人万博1manbetx

六轮电动驱动的漫游者,可以在不平坦的地形上航行以获取样本。

ScorBot工具箱

控制和监控你的基诺瓦手臂

该知识库包含一个matlab库来模拟TriPed机器人以及几个例子。
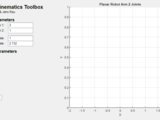
易于使用的完全可配置模拟2关节机械臂逆运动学GUI。


机器人逆运动学优化算法的MATLAB源代码
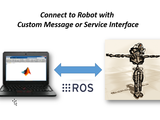
在MATLAB和Simulink中使用自定义ROS消息和服务类型。万博1manbetx
matlab中的KUKA iiwa机器人控制工具箱。

用于轨迹规划和执行器分析的机械手和移动机器人模型。

三自由度非平面机械臂PID控制器自动整定,并通过在所有3个关节处下达步进命令进行仿真。

利用RL模型自由值迭代算法(Actor批评家结构)控制微分机器人的动态模型。
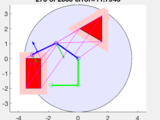
一种用于n连杆平面机械臂在多边形障碍物(或点障碍物)间移动的路径规划方法。设置参数以查看预构建示例。

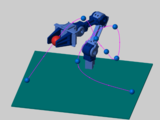
这是一个三维机械臂的Simscape模型

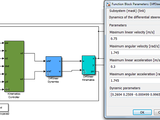
这个文件表示球形机器人Norma的动力学。详情请登录https://arxiv.org/pdf/1908.02243

机器人操作臂三维动画可视化

本程序是Delta机器人的动画仿真程序。

带有LQR控制器的EV3赛格威机器人模型。可以在硬件上运行(EV3)

控制器在快速不稳定轨迹之间跳跃。它具有响应速度快,沉淀时间短的特点
用于ROBOTIS o万博1manbetxpen机械手建模和仿真的MATLAB和Simulink文件

模拟器- Motoman Robot I20

UR5机器人正运动学和逆运动学的Matlab类,以及一个用于可视化的类


质押算法-迷宫上的胸腺机器人模型
该函数将创建一个新图形,显示任何机械臂的工作轨迹
模块用于仿真差动转向(独轮车)移动机器人。控制器包括!
解决了一个简单的机器人手臂的逆运动学问题,并使运动动画到期望的点“p”。

这个包包括一个Webots模拟,其中e- puc2机器人由MATLAB程序控制。

控制器具有响应速度快、稳定时间短的特点。您可以在图中探索它的行为。它为任何IC绘制输出信号。
球面手腕机构的运动学分析。

通过射频链接将EDR传感器的数据转换为MATLAB脚本、函数和图形。

应用3D视觉传感器控制移动机器人。

对演示的额外离散建模增强

万博1manbetxSimulink for PCV是一个用于3D点云视图的块和封装的原生OpenCV库。
MiniQ 2WD/4WD机器人入门模块库

基于模型设计演示的运动控制实例研究

万博1manbetx与Rapiro内部的Arduino和树莓派对话的Simulink模型

万博1manbetx本次网络研讨会使用的Simulink模型和CAD文件:移动机器人的避碰仿真
MatLab GUI控制一个5R对称并联机构

单击并拖动查看手臂的响应。包括注释良好的派生代码。


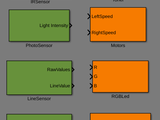
我的乐高头脑风暴EV3线追随者使用两个光传感器。主要是给高中生演示工程是有趣的。

文档,仿真和Arduino/树莓派的设计和模型

万博1manbet万博1manbetxxSimulink支持Kinect是一组与OpenNI和Kinect SDK接口的Simulink块。

6DoF机器人simu万博1manbetxlink仿真图

计算了常见工业串联机器人的万博 尤文图斯运动学逆解
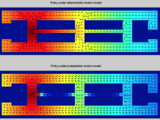
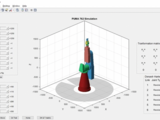
应用值迭代来学习网格世界中机器人的策略。
三自由度PUMA560机器人PID控制器的MATLAB代码
多自由度机器人机械手设计与仿真
从PC上使用Matlab轻松控制iRobot Create 2
Dynamixel的控件库
演示文件将伴随Simulink网络研讨会的介绍万博1manbetx
文档,仿真和Arduino/树莓派的设计和模型
您也可以从以下列表中选择网站: