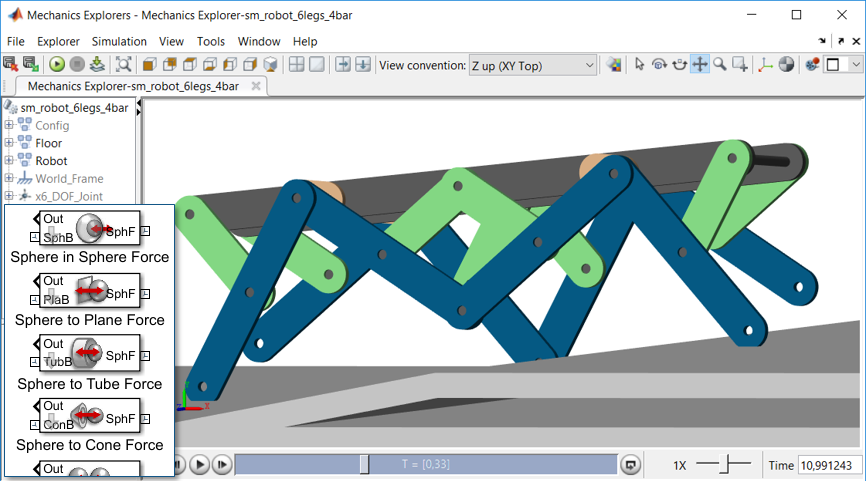
该库包含在Simsceiv Multibody中的多体模型的接触力模型和强制规律。它们涵盖了2维和3维问题,无论有或没有摩擦。提供了超过45个示例模型,包括基本接触力示例(弹跳球)和更复杂的应用,如凸轮从动机构,差动驱动机器人和带夹具的机器人臂。包括线性和非线性强制法律,您可以轻松地添加自己的自定义力法。
请阅读上手的README.md文件。
上面使用“从GitHub下载”按钮来获取与MATLAB的最新版本兼容的文件。
使用下面的链接获得与MATLAB的早期版本兼容的文件。
对于R2020b:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/20.2.5.0.zip.
对于R2020a:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/20.1.5.0.zip.
对于R2019B:https://github.com/mathworks/Simscape-Multibody-Contact-Forces-Library/archive/19.2.5.0.zip
对于R2019A:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/19.1.4.1.zip.
对于R2018B:https://github.com/mathworks/Simscape-Multibody-Contact-Forces-Library/archive/18.2.4.1.zip
对于R2018A:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/18.1.4.1.zip.
对于R2017B:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/17.2.4.1.zip.
对于R2017A:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/17.1.4.1.zip.
对于R2016B:https://github.com/mathworks/Simscape-Multibody-Contact-Forces-Library/archive/16.2.4.1.zip
对于R2016A:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/16.1.4.1.zip.
对于R2015B:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/15.2.4.1.zip.
对于R2015A:https://github.com/mathworks/simscape- multibody-contact-forces-library/archive/15.1.4.1.zip.
了解如何使用这些力来模拟凸轮追随器机制:
//www.tianjin-qmedu.com/videos/modeling-contact-forces-in-a-cam-follower-94291.html.
通过观看这个网络研讨会了解有关Simsceive Multibody的更多关于多体模拟的更多信息
//www.tianjin-qmedu.com/videos/multibody-simulation-with-simmechanics-81877.html.
通过搜索关键字“物理建模”的帖子来查找其他Simscape示例
//www.tianjin-qmedu.com/matlabcentral/fileexchange/?Term=%22physical+modeling%22
了解有关Mathworks Simscape产品的更多信息:s manbetx 845
//www.tianjin-qmedu.com/physical-modeling/
引用
史蒂夫米勒(2021)。Simscape Multibody接触力库(https://github.com/mathworks/Simscape-Multibody-Contact-Forces-Library/releases/tag/21.1.5.0),GitHub的。检索到。
Matlab释放兼容性
平台兼容性
视窗 苹果系统 Linux.类别
标签
致谢
启发:多体模拟器自行车稳定性那建模气动执行器的机器人那SPHERO仿真的Simscape多体那塔式起重机多体模型那设计机械手算法那MATLAB和Simu万博1manbetxlink机器人竞技场:介绍联系建模