扩展Simscape多体模型,使其具有跨越多个物理域的物理效果。

Simscape多体的参数化零件,带齿轮组件和用于挤压的MATLAB代码

该文件包含用于教学和学习控制系统的倒立摆Simscape多体仿真模型。

本课程介绍了建模和仿真(8章,90多个模型和脚本)MATLAB, SImulink, SImscape, statflow万博1manbetx

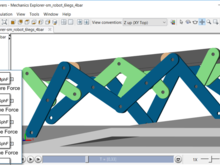
剪刀式升降机由参数化的库,可重复使用的组件,与液压驱动器。
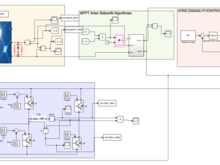
Farklı ışınım değerlerine maruz bırakılan bir güneş paneli hücresinin MPPT algoritması ve ayrık zamanlı PI kontrolcü ile referans takibi。

升降台采用液压驱动,由模拟电路控制,带有三维剪刀机构。

实体几何库工具箱:创建曲面模型、导出以进行三维打印、从CAD系统导入、机器人技术、机构

改进了Simscape的“通用柔性梁”,用于计算矩形梁梁端部的von Mises应力。

一些简单的示例演示如何设置模型,以便在Live Editor、Simulink和Simscape模型之间进行交互。万博1manbetx
接触力示例和库。

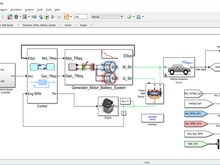
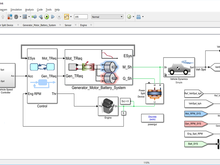
一种具有系统级和详细的电气系统变型的并联式混合动力汽车模型。

双离合器变速器与MATLAB脚本,以优化换挡计划。


来自实践研讨会活动的Simscape教程练习。

反铲模型,包括用于臂和铲斗倾斜的液压执行器,以及多体动力学。

执行机构具有理想的液压和电气设计。
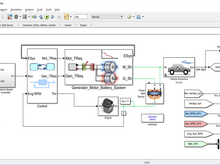
这是一个用于乘用车混合动力模型的Simscape模型。
这是一个离散步长求解器Simulink模型用于乘用车混合动力汽万博1manbetx车(HEV)模型
HEV模型Raspberry PI和AWS连接的Python代码

该系统由弹簧、阻尼器和质量三部分组成。该系统可用于研究大多数动态系统的响应。

这是球上板模拟人生观模型,控制和诊断。硬件有两个伺服作为输入,球的位置作为输出
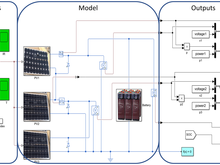
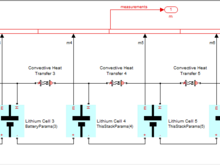
本次提交利用Simscape对10个光伏电池板进行建模。并提出了一种考虑环境温度影响的方法。
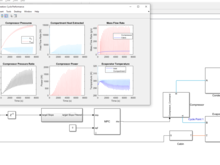
这是一个小型车辆的Simscape HVAC模型。该模型还有一个MPC控制器,用于操纵压缩机。
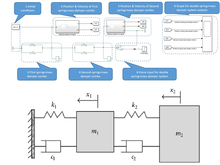
这是利用Simscape建立的经典双质量弹簧系统模型
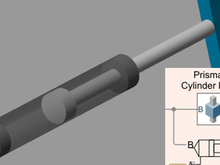
计算温度和传热的LMTD方法。基于管块。

此示例演示如何使用Simulink Simscape对空气轨道上两个滑块之间的弹性和非弹性碰撞进行建模万博1manbetx

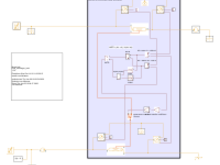
该文件定义了sn SMD系统,对其自动调整PID控制器,然后通过3种不同的方法建模后,对其进行仿真。

这些文件用于将风力涡轮机硬件连接到Amazon AWS



一个简单的热交换器问题之间的两热液体使用Simscape。计算是基于E-NTU方法。
Simscape电气(Simscapeベースのライブラリ)を評価するためのチュートリアル(教程来评估自己Simscape电气(基于Simscape库))

Simscape电气公司(Simulink万博1manbetx)ベースのライブラリ) を評価するためのチュートリアル / (自学评估Simscape Electrical(基于Simulink的库)的教程)
使用Simu万博1manbetxlink和Simscape模块模拟一个反馈控制器,该控制器调节喷气式通风机产生的峰值压力。
万博1manbetx使用simscape/power systems/专门技术工具箱的Simulink模型显示了带有电解槽负载的DC/DC升压变换器。

指尖陀螺三维物理模型


用于车辆建模的Simscape库

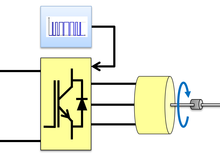
利用MATLAB产品演示无刷直流电机矢量控制的设计s manbetx 845
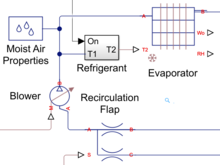
自定义Simscape湿空气库中的车辆HVAC系统模型。

用于查看物理变量的探测器
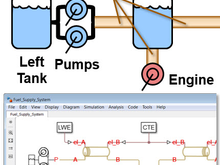
燃油供应系统包括油箱、燃油管路、泵、控制系统和自动测试的MATLAB代码。
Simscape电力系统教程,自己评估Simscape电力系统
Simscape多体教程,自己评估Simscape多体
Simscape Electronics教程,自己评估Simscape Electronics

Simscape教程,自己评估Simscape
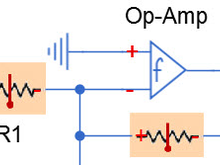
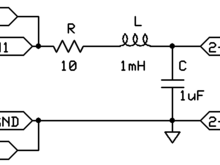
在Simscape中作为模拟电路实现的有源滤波器,其增益随温度变化。

起落架模型,包括主液压执行器和锁定液压执行器,以及多体动力学

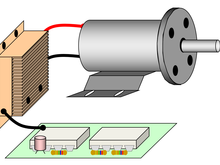
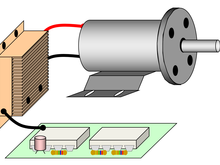
模拟风景™ 语言机电示例定义一个简单的直流电机。

用于探索Simscape™模拟数据和零交叉统计的工具,在MATLAB中创建®代码

模拟风景™ 非线性机械弹簧的语言实例

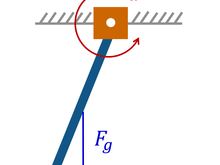
MATLAB代码建立了单摆和多摆的Simscape多体模型

该版本最初由Andreas构建,具有修复崩溃问题的旁路循环
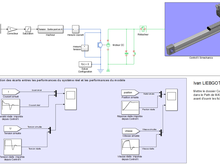
Modélisation multi physique MATLAB 2015b de l'axe linéaire Control'X(伊万·利布戈特)

Maxpid avec SimMechanics2G机器人多体格模型
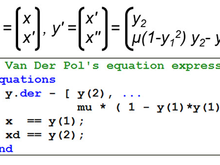
Simscape语言示例演示如何实现和求解非线性二阶常微分方程。