设计机器人操纵器算法
此提交包含用于MATLAB和SIMULINK机器人竞技场视频,“设计机器人机械手算法”和“控制机器人操纵器关节”的所有文件。万博1manbetx
文件包括以下内容:
- Matlab脚本演示如何为机器人操纵器实施反向运动算法
- 万博1manbetx使用配置空间和任务空间控制器的机器人操纵器的扭矩控制模拟模型
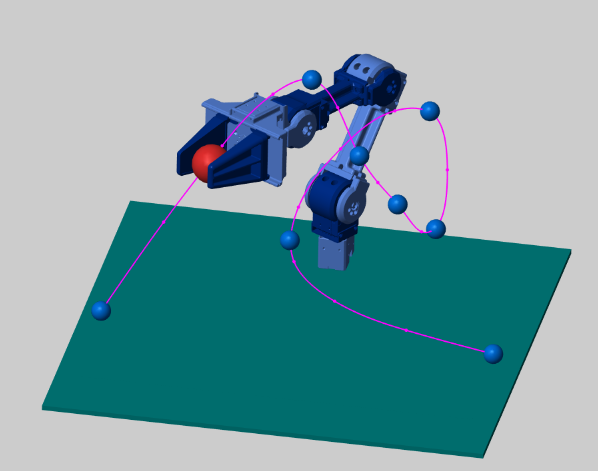
- 万博1manbetx使用派生的逆运动学算法拾取对象并遵循轨迹的Simulink模型
- 万博1manbetx使用反向运动学的机械手的Simulink模型,以捕捉空气中的物体,以演示可能的下一步骤和感知算法的集成
运行脚本和模型所需的所有文件,包括CAD文件和URDF文件包含在提交中或使用提供的启动脚本下载。您必须安装命令行git以自动下载机器人描述文件。
为方便起见,本提交中包含了Simscape Multibody Multiphysics库和Simsceive Multibody联系机库的本地副本。如果您想安装这些库的最新版本,您可以在下面找到它们:
* Simscape Multibody MultiphySics库://www.tianjin-qmedu.com/matlabcentral/fileexchange/37636-simscape-移动 - 方法 - 方法--library.
* Simscape Multibody联系力库://www.tianjin-qmedu.com/matlabcentral/fileexchange/47417-simscape- multibody-ContAct-Forces-library.
引用
Mathworks学生比赛团队(2021年)。设计机器人操纵器算法(https://github.com/mathworks-robotics/designing-robot-manipulator-algorithms),github。检索到。