本报告包含四个常用的状态估计过滤器,包括:
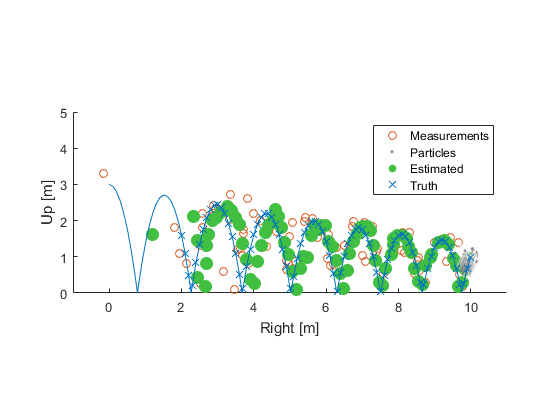
*粒子过滤器(bootstrap过滤器),
* sigma-point(无味)过滤器,
*扩展卡尔曼滤波器,
*和线性卡尔曼滤波器。
它还包括每个示例的演示文件,其中包含许多图、动画和代码注释。
与州估计相关的几个小型公用事业也包括在内。
这些文件对应于“卡尔曼滤波器如何工作”的文章,在这里:
http://www.anuncommonlab.com/articles/how-kalman-filters-work/
引用作为
塔克麦克卢尔(2021)。粒子,sigma点和卡尔曼滤波器GitHub (https://github.com/tuckermcclure/how-kalman-filters-work-examples)。检索.
要查看或报告这个GitHub插件中的问题,请访问GitHub库.
要查看或报告这个GitHub插件中的问题,请访问GitHub库.