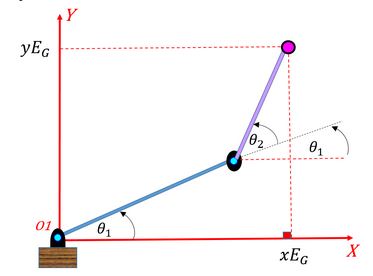
这个例子展示了如何定义一个具有符号变量的二连杆平面机器人手臂,并计算正运动学和逆运动学。该示例还使用等高线图显示结果。并在Simulink模型中演示了如何计算系统的雅可比矩阵并进一步使用它。万博1manbetxSimu万博1manbetxlink模型使用逆运动学方程和系统雅可比矩阵来模拟机器人,使其写出或画出“hello”这个单词。
引用作为
Mihir Acharya(2021)。2-连杆机械臂的逆运动学(//www.tianjin-qmedu.com/matlabcentral/fileexchange/69892-inverse-kinematics-of-a-2-link-robot-arm), MATLAB中央文件交换。检索.
MATLAB版本兼容性
创建R2018b
与任何版本兼容