机器人手臂潜在场导航
1.0.2版(5.74 kB)
Aaron T. Becker的机器人群体实验室
用于N-Link Planar机器人手臂的路径策划器,在多边形障碍物(或点障碍物)之间移动。设置参数以查看预构建示例。
一个路径规划师
N.
- 链接平面机器人手臂在多边形障碍物(或点障碍物)之间移动。
视频概述at.
https://youtu.be/xqtdsxyiths.
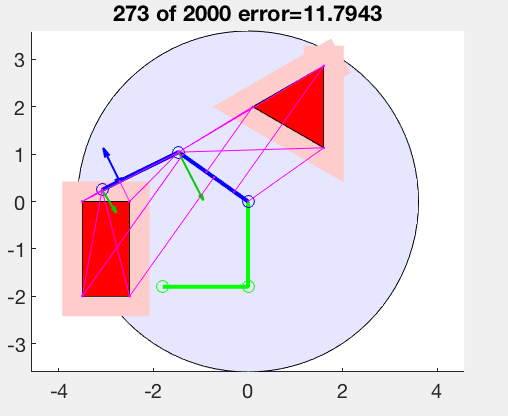
视频使用工作空间电位字段,该字段吸引DH帧的起源,同时避免障碍物。机器人是蓝色的,目标配置是绿色的。目标的有吸引力的力量被绿色箭头绘制。障碍物(红色)是机器人必须避免的点激光器。当机器人在避免区域(粉红色)内时,它经历排斥力(蓝色箭头)。从每个链接到每个链接的最短距离在洋红色中绘制。
只需设置输入参数“
选择
“要运行预设演示,或修改DEMOS以满足您的需求:
如果选择== 2,“两个链接机器人陷入本地最小,必须随机步行逃脱”
elsef.选择== 3,“这本地最小值非常深刻,需要长时间的随机行走来逃避。它并不总是逃脱(有时它永远被困)。”
elsef.选择== 4,“多边形障碍物,确实达到了局部最小,但通常快速逃脱”
elsef.选择== 5,“4连锁机器人,多边形障碍物,有”喋喋不休“,这使得它需要时间来解决”
基于第5.2章“
机器人建模与控制
“通过Spong,Hutchinson和Vidyasagar
Aaron T. Becker,04-13-2016 - 11/14/2019,atbecker@uh.edu此解决方案使用Mary Burbage,2017年MS的代码。
引用
Aaron T. Becker的机器人Swarm Lab(2021)。机器人手臂潜在场导航(//www.tianjin-qmedu.com/matlabcentral/fileexchange/73617-robot-arm- potential-navigation),Matlab中央文件兑换。检索到。