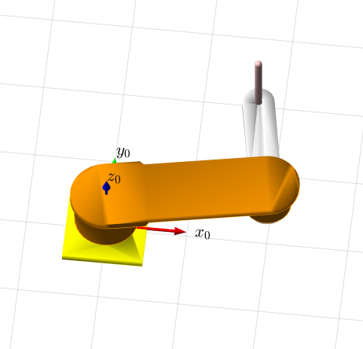
这是一个简单的机器人工具箱设计学习和了解机器人的正运动学操纵者。
不像彼得·柯克的工具箱,表示不自动完成通过Denavit Hartenberg表示,但齐次变换是在用户的自由裁量权,因此表示是由用户。该特性使代表并联机器人的运动图,发那科机器人paralelogram配置等。
任何运动图的所有元素可以代表固体部分(3 d帧,关节和连接)。固体需要STL文件的链接。如果你不需要固体的表示链接,这些可以通过简单的线。
工具箱需要下一个包括互补工具箱/功能:
* FreezeColors工具箱由约翰·球队(2005)
*由弗朗西斯Esmonde-White Stlread和patchslim功能(2010)。
为使用该工具箱提供了几个例子。
引用作为
凯萨查维斯(2023)。简单的机器人工具箱(//www.tianjin-qmedu.com/matlabcentral/fileexchange/80137-simple-robotics-toolbox), MATLAB中央文件交换。检索。
MATLAB版本兼容性
创建R2016b
与R2016b后来版本兼容
平台的兼容性
窗户 macOS Linux标签
互补的工具箱/ STL
互补的工具箱/ freezeColors
互补工具箱/ freezeColors /测试
例子/ GUI比如Graficar STL
例子/机器人SCARA cinematica
Matlab R2016b工具箱Robotica查韦斯
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.0.3 | 最后更新:2021年9月 |
|
|
| 1.0.1 | 添加了一些有用的功能 |
|
|
| 1.0.0 |
|