文件交换
MATLAB和Simu万博1manbetxlink工具车辆运动学、可视化和传感器模拟。
两轮自平衡机器人的三维模型控制使用PID控制器和手动调整
示例文件为MATLAB和Simulink仿真机器人领域步行万博1manbetx机器人视频。
移动机器人训练库和仿真地图发生器应用培训视频系列。
四轴飞行器与多体、电和热模型遵循路径提供一个包。
建模与仿真的MATLA万博1manbetxB和Simulink文件ROBOTIS OpenManipulator
这个工具箱是一组虚拟环境仿真软件旨在帮助移动机器人的基本概念的教万博1manbetx学
LEGO MINDSTORMS EV3获取传感器数据和控制输出
所有文件相关的学生竞争,移动机器人技术培训视频系列。
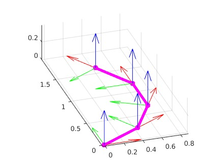
MATLAB和Simu万博1manbetxlink机器人的轨迹生成和评估实例。
例子创建移动机器人自主导航软件栈,使用MATLAB和Simulink作出万博1manbetx
机器人模型库与MATLAB和Simulink可视化和模拟机器人万博1manbetx
立体几何库工具箱:创建表面模型,导出3 d打印技术,进口从cad系统,机器人技术,机制
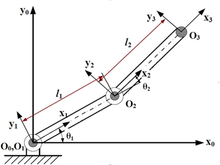
简单而直接的dh参数在MATLAB的实现。
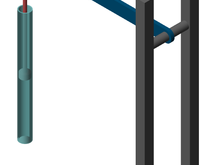
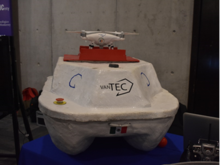
这个提交包含文件中使用这个视频在建模、仿真和控制的自主水下航行器
这个工具箱用于表示任何机器人的运动图使用固体三维框架和固体链接。
万博1manbetx仿真软件模型和CAD文件中使用这个网络研讨会:移动机器人避碰仿真
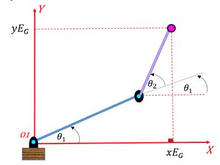
计算和可视化的逆运动学2-link机器人手臂的雅可比矩阵,并使机器人写你好。
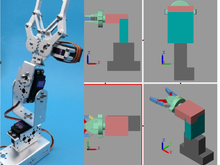
机械臂转移两个传送带之间的部分
机械手和移动机器人轨迹规划和执行机构的分析模型。
统一的模拟和分析平台软、刚性和混合机器人系统
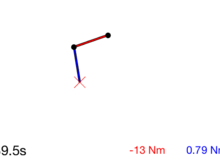
转发平面二自由度机器人机械手的动态连续时间函数输入τ的输入函数和离散时间τ
与电驱动四足机器人模型,包括步态分析和设计工作流程。
方法对两连杆机械手的动力学模型预测控制机器人。
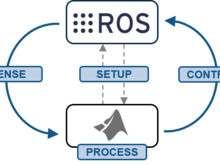
资源开始使用MATLAB仿真软件和机器人操作系统(ROS)。万博1manbetx
模拟的机械手臂
这个功能块的工作空间平面n-DOF转动或移动DH参数和所有变量的约束。
这个提交包含气动机器人模型与仿真软件创建,Simscape, Simscape多体。万博1manbetx
这是一个3自由度机械手臂Simscape模型
3自由度正运动学ArmRobot模拟(GUI)模式MeArm使用Denavit-Hartenberg公约
自定义场景在虚幻的®在仿真软件编辑自主飞行的联合仿真算法万博1manbetx®
RoboDK API允许您直接从Matlab模拟和程序机器人手臂的代码
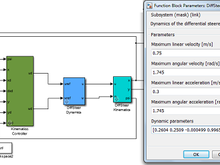
块微分带领(独轮车)移动机器人的仿真。控制器包括!
单击并拖动看手臂回应。包括了良好的注释派生的代码。
六足机器人克劳迪奥·Urrea & M.Sc.-Eng博士(模拟)。Luis Valenzuela
6自由度机器人仿真的模万博1manbetx型图
逆与递归的牛顿-欧拉动力学开放运动链和标准dh参数
使用自定义ROS在MATLAB和Simulink消息和服务类型。万博1manbetx
MATLAB代码3自由度PID控制器的PUMA560机器人
驱动你的TurtleBot和获得传感器数据。
万博1manbetxUSV仿真软件模型
三角洲三自由度机器人,建立工作区和多维数据集内
这个工具箱提供了有用的函数用于创建和操纵对偶四元数。
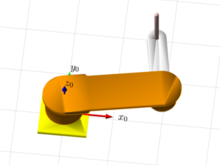
一个等控制器是专为乐高机器人,在MATLAB / Simulink中实现平衡万博1manbetx
在附呈的档案中你会发现这个图形用户界面(MATLAB GUI)正向和逆向运动学的多自由度机械臂。
这个仓库是帮助学生开始以实用方法使用,使用MATLAB和Simulink感知算法。万博1manbetx
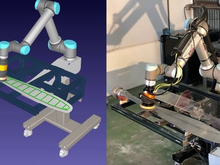
Kinova Gen3机械手MATLAB和Sim万博1manbetxulink的支持万博1manbetx
2维逆运动学仿真3自由度使用伪逆雅可比矩阵
这个程序是三角洲的动画模拟程序的机器人。
基于模型的自动交通仿真框架开发自动驾驶算法和测试他们的城市交通环境。
这是一个简单的基于模型的故障树分析(FTA)的原型万博1manbetx
n-link平面机械臂的路径规划移动多边形之间的障碍(或点障碍)。设置参数预先构建的示例。
使用伪逆雅可比矩阵逆运动学MeArm模型
补充文件Road2FEI学生竞争和公众
一个分布式机器人实验多智能算法的实验验证。
这是一个3 d仿真彪马762机械手能够解决正向和逆向运动学。
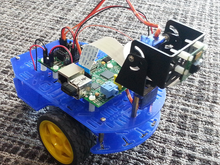
控制与MATLAB和Simulink覆盆子π驱动机器人万博1manbetx
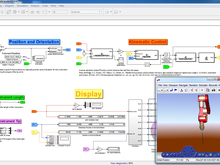
文件中使用MATLAB和Simulink仿真机器人领域万博1manbetx:模拟视频四轴飞行器任务
MATLAB应用程序与ROS移动机器人应用程序。
从matlab工具箱库卡iiwa控制机器人。
选择一个网站
选择一个网站翻译内容,看到当地事件和提供。根据你的位置,我们建议您选择:。
你也可以从下面的列表中选择一个网站:
选择中国网站(中文或英文)最佳站点的性能。其他MathWorks国家网站不优化的访问你的位置。
联系你当地的办公室