这个提交包含文件中使用这个视频在建模、仿真和控制自主水下航行器-//www.tianjin-qmedu.com/videos/modeling -和-模拟- - -自主水下车辆1586937688878. - html。这个提交模型6自由度自主水下航行器(AUV)和AUV的位置和速度控制器。你可以切换高低保真度传感器和环境模型根据应用程序的需要。
航空航天Blockset用于车辆的动力学模型。学习如何使用系统辨识模型的推进器,看这个视频//www.tianjin-qmedu.com/videos/matlab -和-模万博1manbetx型-机器人领域——从-数据-模型- 1518156121608. - html
文件:
AUVmodelingandsim。撮合下,启动项目和apporopriately设置环境。
资源——项目资源
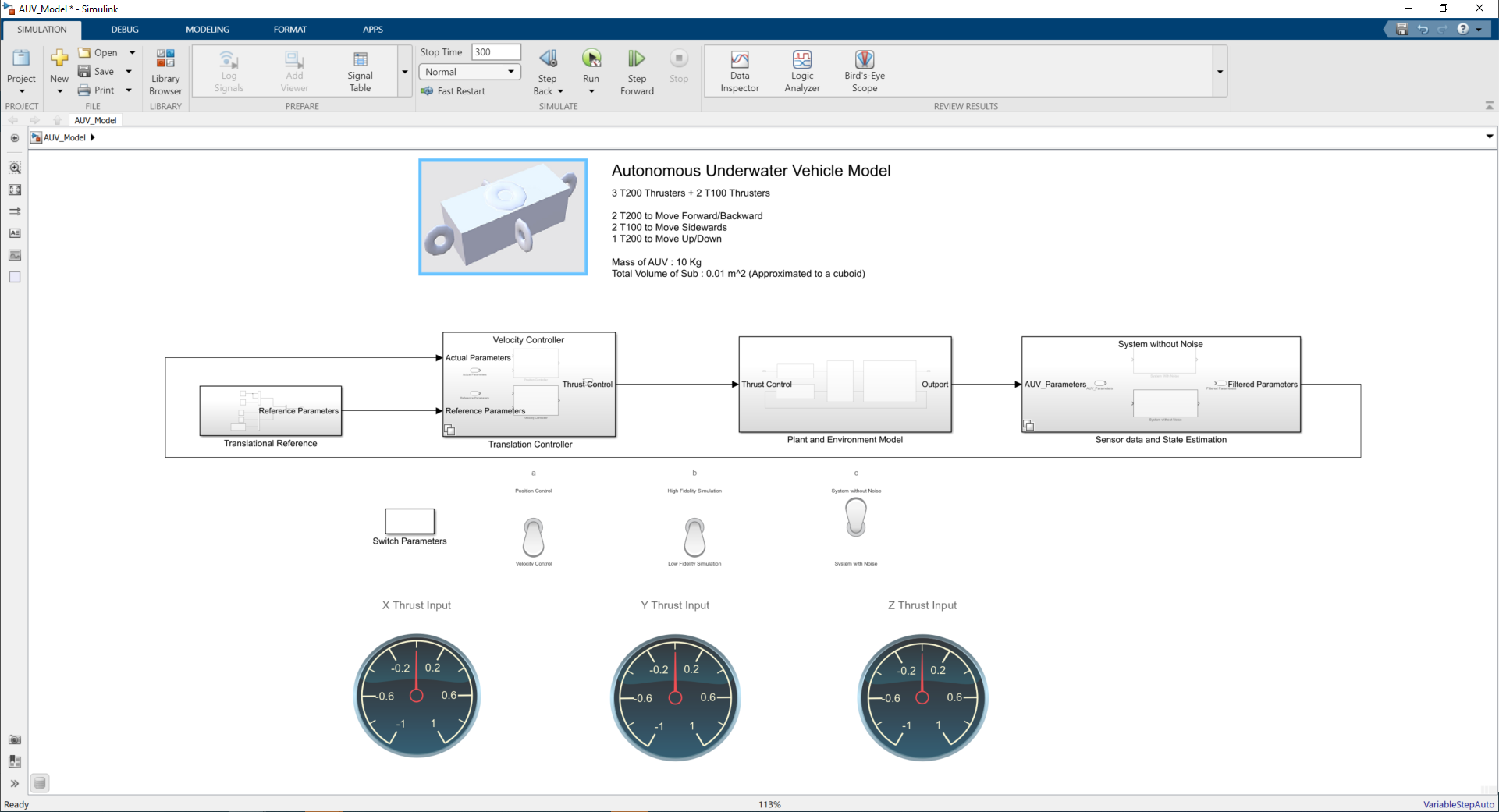
文件\ AUV_Model。基金——与A万博1manbetxUV模型仿真软件模型
文件\ setax。m - MATLAB可视化AUV helper函数
联系人:
与任何问题或建议请写信给roboticsarena@mathworks.com
引用作为
MathWorks学生竞赛团队(2022)。自主水下航行器的建模与仿真GitHub (https://github.com/mathworks/AUV-modeling-and-sim)。检索。
文件
文件
问题在这个视图或报告GitHub插件,参观GitHub库。
问题在这个视图或报告GitHub插件,参观GitHub库。