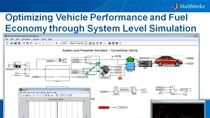
了解如何简化自动水下航行器(AUV)的建模。Yashodhar Veeralla加入Connell D'Souza,讨论使用基于模型的设计和航空航天区块集™ 建立仿真模型。
Yashodhar将解释建立模型以模拟AUV动力学的各个步骤。他从AUV的基本知识和感兴趣的部件开始,然后介绍了施加在水下航行器上的各种力和力矩,以及与潜艇运动有关的科学术语。还解释了使用航空区块集进行建模背后的动机。
Yashodar讨论了AUV建模的各个组成部分,如车辆推进、静水压力、水动力、噪声和过滤。他还演示了Simulink万博1manbetx®使用这些概念构建的模型。最后,他讨论了基于目标场景的水下机器人可能的控制规律。
额外资源: