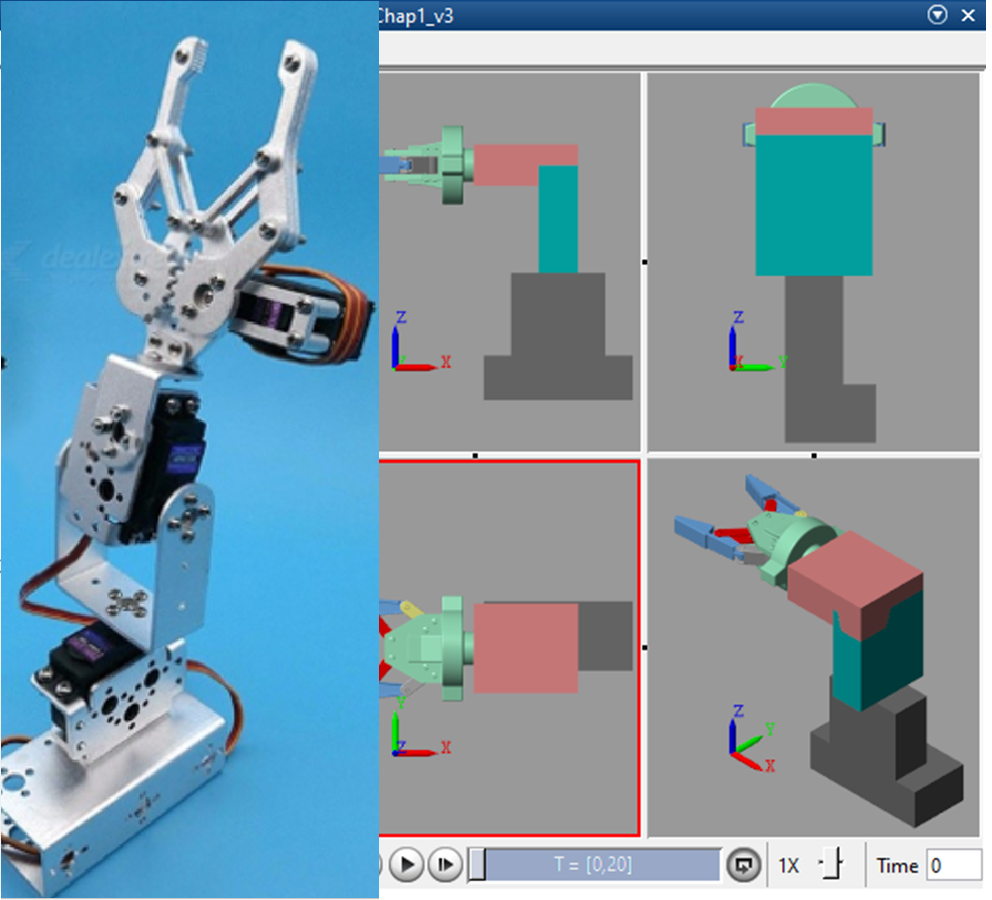
在此提交我们模型的一小升高3自由度(自由度)购买的机械手臂www.roboholicmaniacs.com在MATLAB Simscape。在这个部门是步进电机使用的致动器。主要输入3自由度的手臂是这些致动器将输出的转矩角x, y和z终端执行器的位置或爪。
这些代码是书中的第三章的一部分:
“数字双开发和部署在云上“爱思唯尔,2020年,纳西姆•哈立德,Bibin Pattel和Affan西迪基
引用作为
纳西姆•哈立德(2023)。使用Simscape建模与仿真的机械手臂(//www.tianjin-qmedu.com/matlabcentral/fileexchange/74335-modeling-and-simulation-of-robotic-arm-using-simscape), MATLAB中央文件交换。检索。
Chapter_3_3DOF_arm_codes
Chapter_3_3DOF_arm_codes / Application_Problem_arm
Chapter_3_3DOF_arm_codes
Chapter_3_3DOF_arm_codes / Application_Problem_arm
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.0.0 |