逆动力学与递归-欧拉描述的开放的运动链dh参数标准
可选:
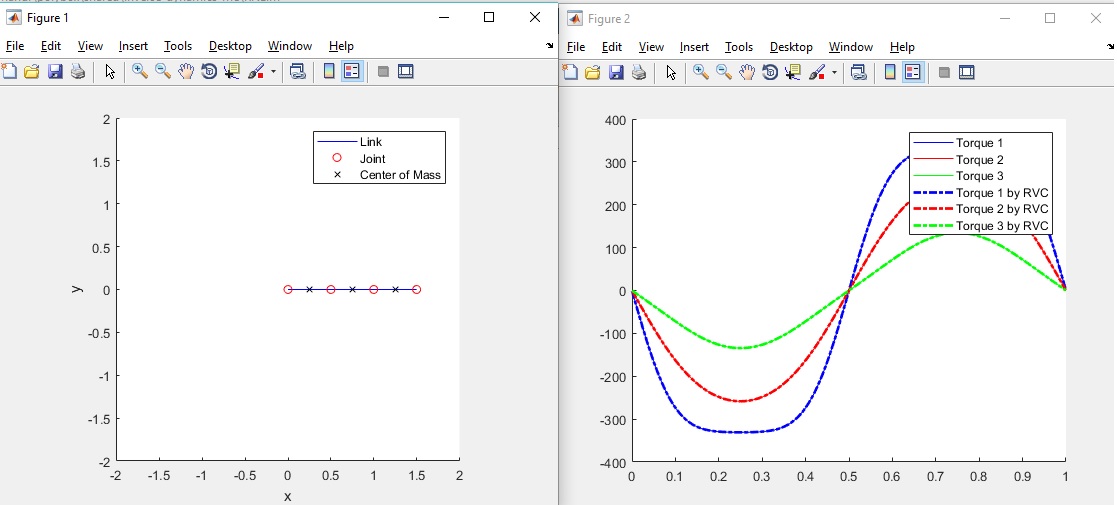
机器人工具箱用于比较:http://www.petercorke.com/RTB/
下载并解压文件。添加路径MATLAB使用“pathtool”命令。然后输入“startup_rvc”MATLAB命令提示符。
限制:
——没有重力和外部力/力矩(即将;-))
引用作为
Auralius Manurung (2023)。逆与递归的牛顿-欧拉动力学GitHub (https://github.com/auralius/inverse-dynamics-rne)。检索。
版本使用GitHub缺省分支不能下载
| 版本 | 发表 | 发布说明 | |
|---|---|---|---|
| 1.0.0.0 |
|
问题在这个视图或报告GitHub插件,参观GitHub库。
问题在这个视图或报告GitHub插件,参观GitHub库。