移动机器人和UGV的自主导航
version 20.2.2 (17.1 MB) by
MathWorks学生竞赛团队
使用MATLAB和Simulink为移动机器人和UGV创建自主导航软件堆栈的示例万博1manbetx
移动机器人和UGV的自主导航

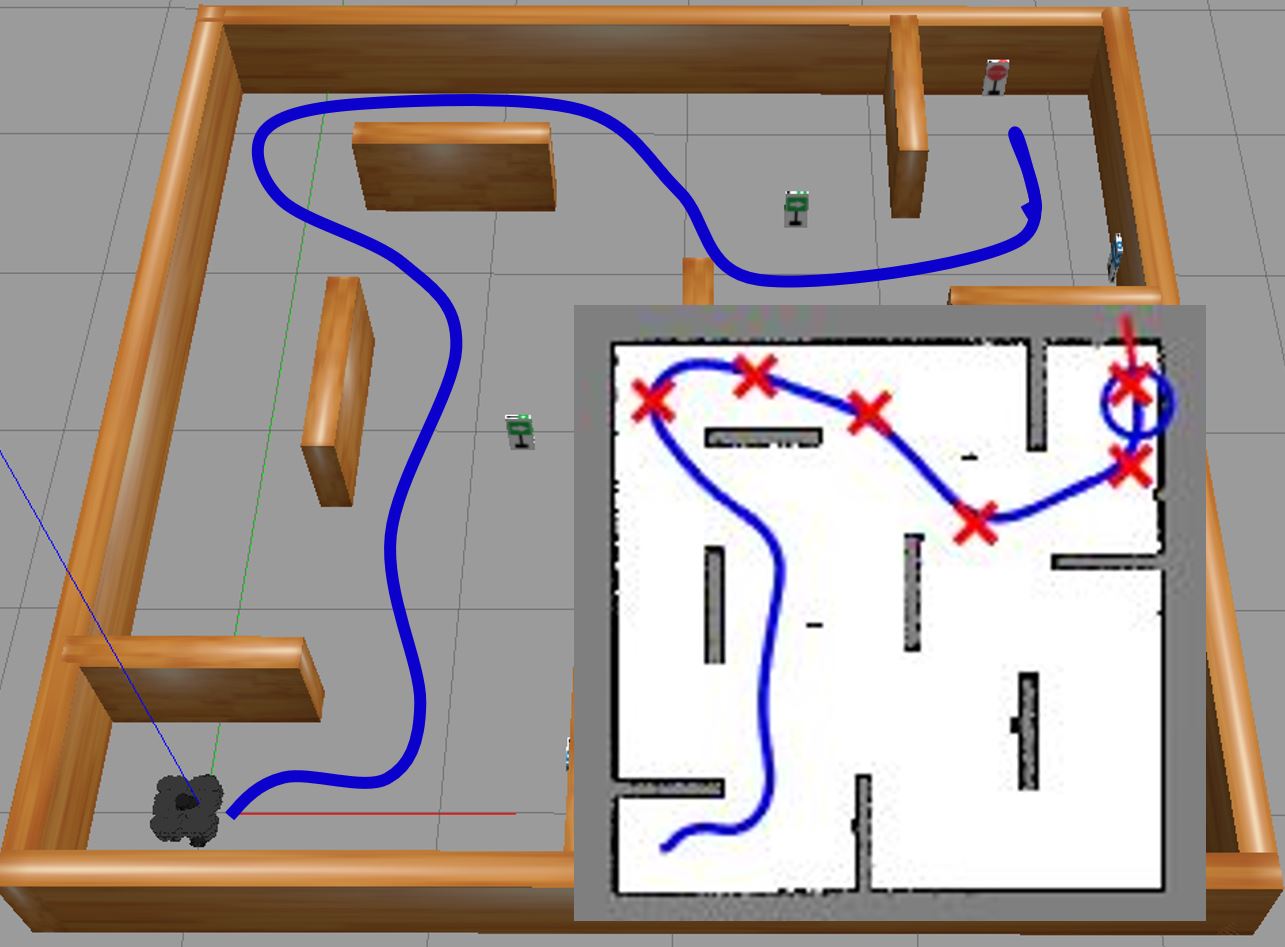
GitHub®知识库包含MATLAB®和Simulink®实例,用于开发移动机器人和无人地万博1manbetx面车辆(UGV)的自主导航软件堆栈。本次提交的示例演示了如何与支持ros的机器人交互,以及设计和测试Turtlebot3自主导航软件堆栈的等效模拟。

脚本和模型集合中涉及的主题包括:
创建自主导航地图
- 从数值数组创建映射
- 从图像创建地图
- 控制基于ros的机器人获取激光雷达扫描
- 从rosbag中导入和绘制ROS数据
- 集成rosbag录音到模拟
- 使用SLAM从激光雷达扫描创建地图
运动规划和路径跟踪
- 使用Pure Pursuit模拟路径点跟踪控制器
- 使用纯追击命令ROS机器人跟随路径点
- 使用PRM Planner生成两个位置之间的路径
- 模拟路径规划和跟踪
- 在ROS机器人中测试路径规划器+跟随器
- 从关键导航点插入平滑路径
- 模拟平滑路径导航
- 使用多项式轨迹导航环境
- 使用梯形速度轨迹导航环境
- 利用VFH控制器模拟避障
- 测试ROS机器人的避障能力
- 模拟完整路径导航堆栈
- 在ROS机器人中测试完整路径导航堆栈
- 使用statflow®模拟路径重新规划调度程序
- 在ROS机器人中测试重新规划调度
要了解更多关于在本次提交中使用的MATLAB/Simulink万博1manbetx工具箱的信息,请访问以下文档页面:
引用作为
MathWorks学生竞赛团队(2021年)。移动机器人和UGV的自主导航GitHub (https://github.com/mathworks-robotics/autonomous-navigation-ugv/releases/tag/20.2.2)。检索.
CreatingMaps /数据
PathPlanning
CreatingMaps
PathPlanning
CreatingMaps
PathPlanning
要查看或报告这个GitHub插件中的问题,请访问GitHub库.
要查看或报告这个GitHub插件中的问题,请访问GitHub库.