
在Arduino板上获取输入并发送输出

从Raspberry Pi获取传感器和图像数据。

在LEGO MINDSTORMS EV3上获取传感器数据和控制输出

从MATLAB控制Ryze Tello无人机并获取传感器和图像数据

从MATLAB控制鹦鹉无人机并获取传感器数据

从MATLAB与BeagleBone Black交互

在MATLAB中控制连接到Arduino硬件的NeoPixel LED条。

在MATLAB中与连接到Arduino硬件的单线设备通信

在MATLAB中控制连接到Arduino硬件的NeoPixel LED条。

在MATLAB中与连接到Arduino硬件的LSM303设备通信。
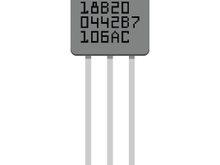
在MATLAB中与连接到Arduino硬件的单线设备通信。
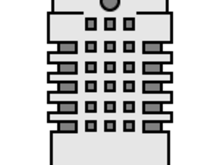
DHT22温度和湿度传感器的Arduino附加库
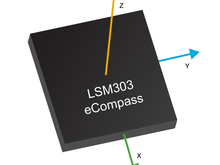
在MATLAB中与连接到Arduino硬件的LSM303设备通信。

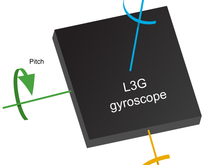
在MATLAB中与连接到Arduino硬件的L3G设备通信。

在MATLAB中与连接到Arduino硬件的L3G设备通信。


获取光刻胶测量值并探索运动检测算法
运行运动检测器(Arduinobj,结束时间)-运行运动检测器(Arduinobj,结束时间)
对走廊事件进行分类(时间、电压)-对运动事件进行分类(时间、电压)
分析运动检测器数据(传感器时间、模拟电压)-分析运动检测器数据(传感器时间、模拟电压)
对运动事件进行分类(时间、电压)-对运动事件进行分类(时间、电压)
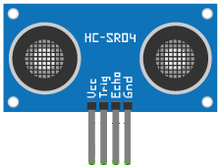
与HC-SR04超声波传感器的接口连接到MATLAB中的Arduino硬件。

求解魔方®使用图像处理和Arduino控制的伺服电机
move2rub(move,varargin)-%将移动转换为官方Rubik代码
TurnCuberRight(立方体状态、伺服前部、伺服后部)-将立方体支架向右转动。左侧的位置较高
FlipCubeForward(立方体状态,伺服返回)-这是一个向前翻转立方体的功能。立方体夹持器是
GetCorners(R、varargin)-%此函数用于获取角点方向/排列
转盘钟(立方体状态、伺服前、伺服后)-该功能旋转与立方体支架直接接触的面
第45(R)条-%使用T45求解多维数据集
编辑状态(varargin)-MathWorks,Inc.版权所有2015。
victoryDance(前伺服)-一个简单的函数,用于演示立方体解算器
读卡尺(伺服前、伺服后)-该函数用于读取多维数据集的初始配置。
OrientCube(立方体状态、目标状态、伺服前方、伺服后方)-此函数包含以下内容
SolvePhysicalCalcube(立方体状态、伺服前、伺服后、R)-面命名约定。相对面由
GetEdges(R,varargin)-%查找3x3立方体的边方向/置换
弯道(C,移动)-定向
TurnCubeLeft(立方体状态、伺服前部、伺服后部)-将立方体保持架向左转动。左侧位置较高的位置
转盘防锁(立方体状态、伺服前、伺服后)-该功能旋转与立方体支架直接接触的面
执行移动(立方体状态、移动、伺服前、伺服后)-此函数包含以下内容
State2Ind(Y,Varagin)-%将排列或方向转换为唯一索引
扭曲边(E,移动)-排列
findpeeks(x)-%在光谱中查找峰值。在网络摄像头捕获期间用于确定

使用MATLAB中的Xbee从无线传感器获取数据
xbee-函数输出=extractFrameData(frameData,remoteATCommand)