
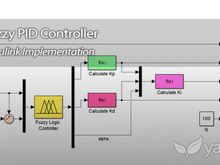
具有自适应增益的模糊控制器示例,用于控制汽车应用中egr阀的位置

该文件包含用于教学学和学习控制系统的倒立摆的SIMSCUPE多体仿真模型。
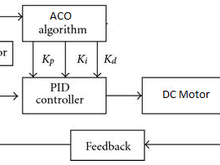
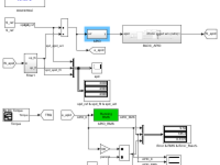
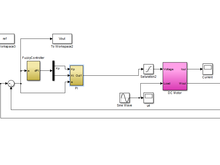
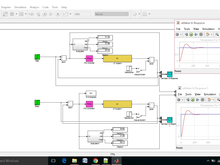
采用蚁群算法求解直流电机速度控制的PID参数

提供用于给定参数的非线性分数级PID控制器的等式。

独立三相四相四腿逆变器模型PID模型MATLAB模型。

只是一些项目的乐趣,特别感谢詹姆斯艾利森博士-我修改了他的代码添加轮胎减震器和控制器。

在FOMCON工具箱的帮助下,PID与FPID

该文件定义了sn SMD系统,对其自动调整PID控制器,然后通过3种不同的方法建模后,对其进行仿真。

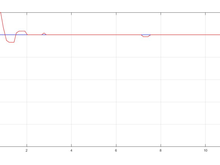
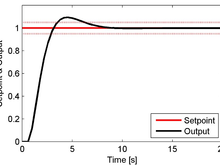
用于参考步骤输入的PID控制系统的仿真。

设计带有buck变换器的PID控制器

此工具箱包含YouTube系列中使用的所有文件。

482/5000 Résultats反贸易P.D.基于M.E.F 4.1引言43 4.1.1计划的双柔性臂机械手控制


这个演示文件显示了在MATLAB和Simullink中PID控制器设计和调整的能力。

Boyd、Hast和Astrom的“通过迭代LMI约束进行MIMO PID调节”的Matlab实现
本文件分享了如何设计和开发一种自适应PID的想法,该PID用于控制无刷直流电机的速度,而不考虑转矩变化
采用simdriveline建立横向车辆动力学模型。
直流电动机速度控制步进和脉冲响应
PID控制器由随机搜索优化算法调整
PID控制器模拟器上的LTI系统W / OR或W / O输入延迟

乐高MINDSTORMS EV3学生竞赛移动机器人训练补充
为您的项目使用和调整PID(比例,积分,微分)控制器
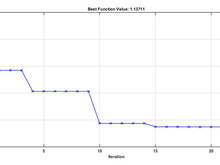
使用微粒群优化的最佳模糊逻辑控制器
LQR已在实际直流电机上实现,具有不同的复杂度修改,并与PID进行了比较
使用PID控制器完全分析和仿真移动倒立摆的。

如何使用Matlab 2015a和维康运动捕捉系统控制AR无人机鹦鹉2.0
了解如何使用Simulink制作基万博1manbetx于Arduino的风扇,使球在指定高度悬浮。
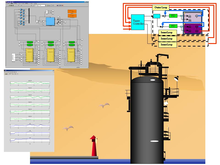
膜分离气体分离器过程的控制模拟。
万博1manbetx用树莓派控制直流电机的Simulink模型。

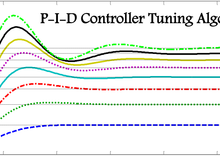
一种研究不同类型Ziegler-Nichols P-I-D控制器整定算法的MATLAB方法
GAOT-ECM实现了用于工业设备识别和PID控制器设计的遗传算法
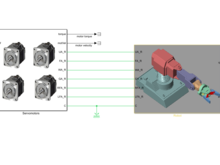
3自由度PUMA560机器人PID控制器的MATLAB代码
使用fminsearch搜索最佳PD、PI和PID参数。
DC/BLDC驱动器的速度和位置控制器使用PSO同时调谐。
此文件夹包含用于为一阶时间延迟系统模拟PID控制器的文件
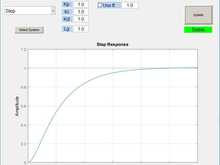
给定一个植物模型,利用PID参数,绘制一个阶跃函数
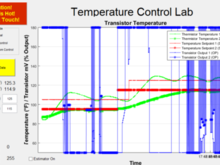
用于MIMO温度控制的Arduino模型预测控制和移动时域估计
这个演示展示了多阶段轧机过程的工厂建模和控制器设计。
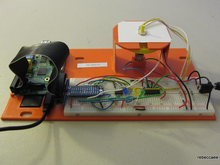
本项目展示了如何使用arduino和simulink控制SISO系统万博1manbetx
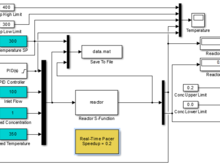
放热CSTR与预测出口温度和浓度。

直流电动机速度控制的二次线性控制分析
弹簧-质量-阻尼模型的PID控制
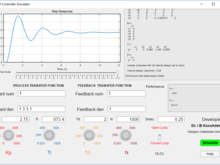
GUI更改SISO lienar系统的PID增益,并查看常用图进行分析。

LQR的输出反馈PID控制器设计LTI SS系统
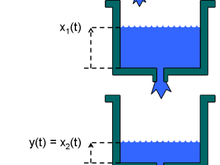
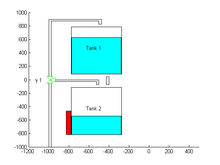
该示例包括使用sysid工具识别两个储罐系统及其PID控制。

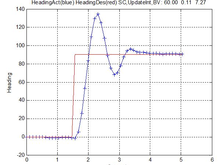
万博1manbetx使用虚拟现实模拟器的Simulink工具箱测试四旋翼飞行器的控制算法
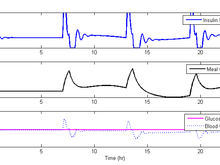
通过调整胰岛素注射泵速率来控制血糖水平

迷你控制实验室旨在解决一些新生班级的教室控制作业。
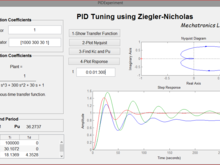
GUI很容易找到P,PI和PID增益使用齐格勒尼古拉斯
PID调谐过程控制仿真教程
阶跃响应PID控制

简单的一阶、二阶和三阶PID仿真。
获取进程列表(pid和名称)。

这里可以研究这两个控制器之间的一些相似性和差异。
另一个使用SYSTUNE设计的级联PI运动控制系统的例子。
基于PID的电力暂态稳定