电机控制块集
设计与实施电机控制算法
电机控制BlockSet™提供Simulink万博1manbetx®用于创建和调整面向现场控制的块和无刷电机的其他算法。 Blocks include Park and Clarke transforms, sensorless observers, field weakening, a space-vector generator, and an FOC autotuner. You can verify control algorithms in closed-loop simulation using the motor and inverter models included in the blockset.
块集参数估计工具在您的电机硬件上运行预定义的测试,以准确估计定子电阻、d轴和q轴电感、反电动势、惯性和摩擦。你可以把这些电机参数值合并到一个闭环仿真来分析你的控制器设计。
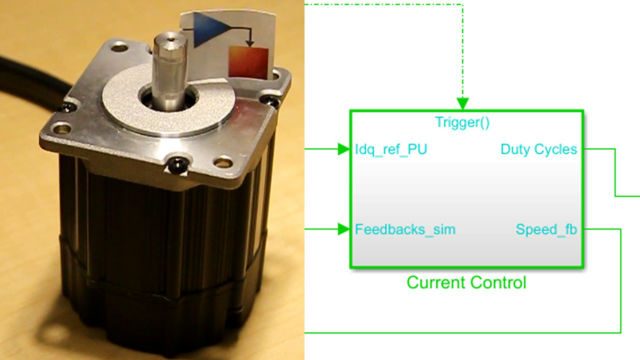
参考示例显示如何验证桌面仿真中的控制算法,并生成Compact C CodeThat支持生产实施所需的执行率。万博1manbetx参考实施例还可用于实现由块集支持的电机控制硬件套件的算法。万博1manbetx
开始:


模拟和代码生成
以完整装配的参考实例为起点,设计和实现面向磁场的表面贴装和内部永磁同步电机(PMSM)、感应电机和无刷直流电机(BLDC)的控制算法。使用这些示例模型在闭环模拟中测试和验证算法设计,然后重用相同的模型来生成和部署嵌入式代码。
电机控制包
使用参考示例来快速生成紧凑且快速的C代码,以实现用于多个支持的电机控制硬件套件的电机控制算法。万博1manbetx直接从Simulink模型自动构建和部署到目标微处理器,以测试电机硬件上的算法。万博1manbetx与主机通信并控制这些目标应用程序。
控制算法设计
使用公园,克拉克,PI控制器,空间矢量发电机,每个安培(MTPA),现场弱化和感应电动机滑动速度估计块,以创造针对Simulink中的PMSM和感应电机的面向现场控制算法。万博1manbetx使用六步换向块来控制BLDC电机。

代码生成
生成快速和紧凑的浮点或定点代码,以便在嵌入式微控制器上实现(使用嵌入式编码器)。使用实时执行分析评估当前循环性能。

探索图库(2张图片)
快速控制原型
使用Simulink实时和Speedgoat电动机控制套件实时测试控制算法。万博1manbetx该套件包括一个完整的软件/硬件包,用于使用模拟和数字I / O在SpeedGoat实时目标硬件上使用电机控制块组开发的无刷直流电机控制算法。

Speedgoat电动机控制套件。
传感器解码器
使用参考例子校准霍尔传感器和正交编码器的偏移量。然后使用传感器解码器模块处理来自霍尔传感器、正交编码器和解析器的信号,以计算转子的位置和速度。

电机控制模块中的传感器解码器库。
观察人士
采用滑模观测器和磁链观测器模块实现无传感器磁场定向控制。使用这些块,从测量的电压和电流计算永磁同步电动机和感应电动机的转子电气位置和机械速度。估计磁通量和机械转矩。在生成嵌入式代码之前,在仿真中调整观测器参数并验证观测器的运行情况。

使用滑模观察块的位置和速度估计。
初始控制器调整
基于电机和变频参数,自动计算初始PI控制器的速度和电流循环增益。提供的脚本通过计算和绘制当前循环的根轨迹,BODE图和步进响应来帮助您分析当前循环动态和频域中的时间和频域(使用控制系统工具箱)。

测试电机硬件上计算的控制器收益。
面向实地的控制自动箱
使用磁场定向控制自动调谐块来调整磁场定向控制器的速度和电流环路增益,以实现每个环路的指定带宽和相位裕度(与Simulink控制设计)。万博1manbetx根据植物模型调整模拟中的增益。您还可以使用Speedgoat目标计算机(使用Simulink real-time)实时调整电机驱动硬件的增益。万博1manbetx

预构建的仪器测试
通过使用在电机上运行预定义测试的参考示例,确定电机的定子电阻、d轴和q轴电感、反电动势、惯性和摩擦参数。您可以使用霍尔传感器、正交编码器或无传感器的观察员进行这些测试。

电机和逆变器型号
模型并模拟表面安装PMSMS,内部PMSM和电动机,使用实现线性大量参数电机模型的块。使用从仪表测试测试的值进行参数化这些模型。将控制器模型与电机型号和提供的平均值逆变器模型结合起来,用于快速闭环模拟。

模拟PMSM和逆变器。
Simscape Electrical的更高保真度建模
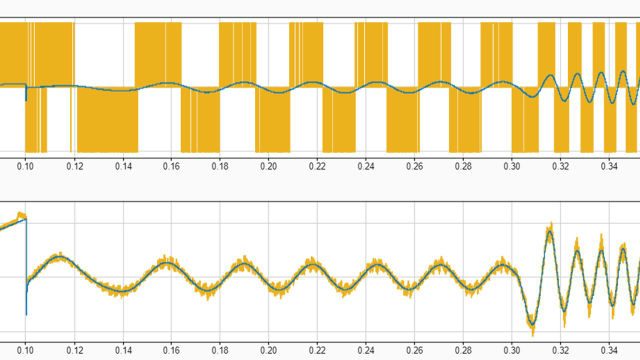
使用Simsceel电气™模型和模拟非线性电动机动力学以及逆变器中的理想或详细切换。测试您的面向现场控制算法,这些控制算法与这些高保真电机和逆变器型号,模拟包含非线性和切换效果。

探索图库(2张图片)
