传感器融合和跟踪工具箱
Design, simulate, and test multisensor tracking and positioning systems

传感器融合和跟踪工具箱™包括用于设计,仿真和测试系统的算法和工具,这些系统融合来自多个传感器的数据,以维持态势意识和本地化。参考实施例提供了用于监控和自主系统的多目标跟踪和传感器融合开发的起点,包括空中,星载,地面,船载和水下系统。
您可以从现实世界传感器融合数据,包括主动和被动雷达,声纳,LIDAR,EO / IR,IMU和GPS。您还可以从虚拟传感器生成合成数据,以在不同方案下测试算法。该工具箱包括多目标跟踪器和估计过滤器,用于评估组合网格级别,检测级别和对象或跟踪级融合的架构。它还提供指标,包括OSPA和GOSPA,用于对地面真相场景验证性能。
For simulation acceleration or rapid prototyping, the toolbox supports C code generation.
Get Started:

Free White Paper
Sensor Fusion and Tracking for Autonomous Systems
Airspace Surveillance
使用来自主动和无源传感器的数据跟踪多个对象,例如雷达,ADS-B和EO / IR传感器。自定义跟踪器以处理机动对象。

Tracking aircraft with Earth-centered scenarios.
Space Surveillance
Track multiple spaceborne objects using data from radar sensors to generate space situational awareness. You can configure the trackers to use a Keplerian motion model or other orbital models.

Tracking space debris using Keplerian motion models.
Ground and Maritime Surveillance
使用高分辨率雷达和激光雷达传感器跟踪地面和海上应用中的扩展对象。

Extended object tracking with lidar.
Single Sensor Tracking
Model and simulate multi-object trackers to perform the processing required in smart sensors. This includes transforming raw data into object track lists.

Track objects using a 3D bounding box generated from a lidar point cloud.
Centralized Fusion
Track extended objects with a centralized tracker that fuses data from multiple sensors and sensor modalities. Use a probability hypothesis density (PHD) tracker to estimate the kinematics of moving objects, along with the objects’ dimensions and orientation. For complex urban environments, implement a random finite set (RFS) grid-based tracker to track each grid cell’s occupancy as well as its kinematics.

从城市环境中的多个激光器的追踪数据融合数据。
轨道级融合
来自多个跟踪源的保险丝轨道,提供更全面的环境估计。在具有带宽约束和使用谣言控制的系统中评估系统中的跟踪融合架构,以消除陈旧结果。

Track-level fusion with lidar and radar sensors.
估算过滤器和数据关联
Estimate object states using a rich library of estimation filters, including linear and nonlinear Kalman filters, multimodel filters, and particle filters. Find the best or k-best solutions to the 2D assignment problem or the S-D assignment problem. Assign detections to detections, detections to tracks, or tracks to tracks.

仅使用非高斯过滤器跟踪。
Multi-Object Trackers
Integrate estimation filters, assignment algorithms, and track management logic into multi-object trackers to fuse detections into tracks. Convert your sensor data into a detection format and use a global nearest neighbor (GNN) tracker for simple scenarios. Easily switch to a joint probabilistic data association tracker (JPDA), a multiple hypothesis tracker (MHT), or a PHD tracker for challenging scenarios such as tracking closely spaced targets where measurement ambiguities exist.

追踪存在测量歧义的紧密间隔目标。
Extended Object and Grid-Based Trackers
Use a PHD tracker to track the kinematics, size, and orientation of extended objects. Using high resolution sensor data such as lidar and radar point clouds, track with grid-based, RFS trackers to estimate the dynamic characteristics of grid cells in complex urban environments.

具有大小和方向估计的扩展对象跟踪。
轨道级融合
Fuse tracks generated by tracking sensors or other track-to-track fusion objects. Architect decentralized tracking systems in bandwidth constrained systems. Reduce rumor propagation to eliminate stale tracker results.

Track-to-track fusion between two vehicles.
融合架构
探索跟踪架构和评估跟踪融合,中央级跟踪或混合跟踪架构之间的设计权衡。使用静态(检测)融合将检测与仅角度和仅限的范围传感器相结合,例如IR,ESM或BISTOG雷达。

Track using distributed synchronous passive sensors.
跟踪场景模拟
生成传感器报告测试跟踪系统。Define multiplatform scenarios and generate motion profiles for each platform using waypoint-based and kinematics-based trajectories. Attach sensor models and signatures to each platform and simulate their reports statistically. Use a simulated ground truth in Monte Carlo simulations to verify and validate tracking systems.
对象轨迹和姿势生成
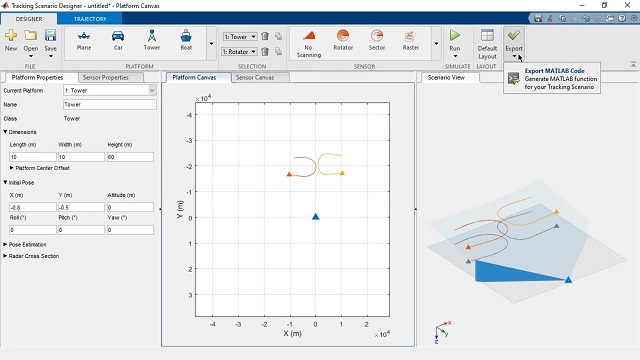
使用跟踪方案设计器应用程序以交互方式定义方案并生成定义和转换不同参考帧中对象的真实位置,速度和方向的MATLAB脚本。
主动和被动传感器型号
Model active sensors (including radar, sonar, and lidar) to generate detections of objects. Simulate mechanical and electronic scans across azimuth, elevation, or both. Model radar warning receiver (RWR), electronic support measure (ESM), passive sonar, and infrared sensors to generate angle-only detections for use in tracking scenarios. Model multistatic radar and sonar systems with emitters and sensors.

用多静电传感器跟踪。
蒙特卡洛模拟
使用不同的随机噪声值执行Monte Carlo仿真。涉及地面真理和传感器配置,以提高测试鲁棒性。

扰动轨迹和传感器以生成测试数据。
跟踪平台的本地化
Perform IMU, GPS, and altimeter sensor fusion to determine orientation and position over time and enable tracking with moving platforms. Estimate orientation and position for inertial navigation systems (INS) over time with algorithms that are optimized for different sensor configurations, output requirements, and motion constraints.
INS传感器Models
Model inertial measurement unit (IMU), GPS, altimeter, and INS sensors. Tune environmental parameters, such as temperature, and noise properties of the models to emulate real-world environments.

模型IMU和GPS传感器以测试惯性融合算法。
方向估计
Fuse accelerometer and magnetometer readings to simulate an electronic compass (eCompass). Fuse accelerometer, gyroscope, and magnetometer readings with an attitude and heading reference system (AHRS) filter to estimate orientation.

通过熔化惯性传感器估计平台的方向。
姿态估计
使用惯性传感器和GPS的非完整标题约束估计姿势。通过熔化具有高度计或视觉径管的惯性传感器来确定没有GPS的姿势。

Visual-inertial odometry using fused IMU and camera data.
场景可视化
Plot the orientation and velocity of objects, ground truth trajectories, sensor measurements, and tracks in 3D. Plot detection and track uncertainties. Visualize track IDs with history trails.

Theater plot of a multiplatform scenario.
Sensor and Track Metrics
Generate track establishment, maintenance, and deletion metrics including track length, track breaks, and track ID swaps. Estimate track accuracy with position, velocity, acceleration, and yaw rate root-mean square error (RMSE) or average normalized estimation error squared (ANEES). Use integrated OSPA and GOSPA metrics to summarize performance in a single score. Analyze inertial sensor noise using Allan variance.

集成跟踪指标,以评估跟踪器性能对抗实践。
调整过滤器和跟踪器
Tune parameters of multi-object trackers such as the assignment threshold, filter initialization function, and confirmation and deletion thresholds to maximize performance. Compare results across trackers and tracker configurations. Automatically tune INS filters to optimize noise parameters.

Tracking point targets in dense clutter with a GM-PHD tracker.
代码生成
Generate C/C++ and MEX code for simulation acceleration or desktop prototyping usingMATLAB Coder™。应用成本计算阈值以减少计算分配成本的时间。

跟踪数千个目标,以获得最快的模拟时间。
RFS跟踪器
使用基于网格的随机有限集(RFS)跟踪器跟踪对象
Trajectory Generation
Create trajectories using earth-centered waypoints
Filter Tuner for Inertial Sensors
Automatically adjust inertial sensor fusion performance for INS, IMU and AHRS filters
Monte Carlo Simulation
Perburb跟踪方案,传感器和轨迹以创建大型数据集进行测试
Lidar Sensor Model
Generate synthetic point clouds as part of tracking scenarios
跟踪方案设计师App
Import tracking scenarios into the app for visualization and redesign
INS传感器
模型并模拟Simulink中的INS传感器万博1manbetx
运动模式
模拟歌手加速运动
看看发行说明有关这些功能的详细信息和相应的功能。