你好。在这个视频中,我们将展示如何设计和模拟一个数字控制算法的功率因数校正。
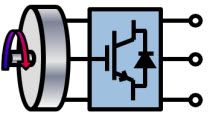
在这里,我们使用Simscape electric和Simulink中的模块建模了一个典型的有源功率因数校正设置。万博1manbetx让我们看看模型的不同元素。我们有一个120V有效值的交流电源连接到一个二极管桥式整流器。该整流器连接到一个数字控制升压转换器和额定为400V的电阻负载。
我们对该子系统中的数字控制算法进行了建模。可以看出,该算法是一个级联控制回路体系结构。外环控制负载电压,内环控制电感电流。
我们的控制算法计算PWM信号,驱动升压转换器的MOSFET。在本视频中,我们将不讨论被动组件的大小。我们将使用模型中已有的电感和电容的参数值,但需要注意的是,我们可以很容易地更改这些值,运行模拟并观察变化。因此,我们可以使用该仿真模型为无源组件选择最优参数值,但我们这里的重点是数字控制算法。
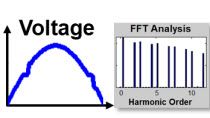
在该模型中,控制器的PI增益设置为初始猜测值。这些增益值不能提供最佳的功率因数校正。我们可以通过运行模型看到这一点。在这个图中,我们可以看到黄色的线电压和蓝色的线电流。电流波形显示谐波的存在,导致功率因数较差。因此,我们需要重新调整控制器,以获得更好的功率因数校正。
我们的工作流程如下:我们将首先调优内部循环,以获得当前循环的最优PID增益。内环调好后,我们将调好外电压环来计算电压环PI控制器的增益。
为了进行调优,我们需要获得一个线性植物动力学模型。对于内环,我们需要获得从PWM占空比到电感电流的动态。我们将使用Simulink控制设计中的线性分析工具来做到这一点。万博1manbetx有了这个工具,我们可以通过进行交流扫描来估计模型的频率响应。我们需要在适当的工作点或偏置点周围进行交流扫描。为了进行交流扫描,我们必须用直流电源替换交流电压源。
该模型被设置为直流工作点,直流电压源为120V,稳态占空比为0.72 [AT1],以保持恒定的直流输出为400V。
我们可以通过将这些信号分别标记为输入和输出线性化点来指定我们对从PWM占空比到电感电流的动态感兴趣。仿真在大约0.15秒时达到稳态,因此我们将在达到稳态时开始频率响应估计。接下来,我们指定将向模型注入采样时间为0.2微秒的固定阶跃正弦流输入。我们将扫频范围设置为10Hz ~ 15kHz,信号幅值设置为0.036,以确保在工作范围内有足够的激励。我们让这个信号的振幅足够小,不至于偏离我们的工作点。
然后我们开始频率响应估计。对模型进行了仿真,计算了装置的频响。我们将导出它到MATLAB工作区,用于PI控制器调优。
在接下来的步骤中,我们在控制子系统中设置电流PI控制器,使参考电流和被测电感电流在闭环中运行。
接下来,我们通过按下块对话框中的调优按钮来调优PI控制器块的增益。这将启动PID调谐器,尝试自动线性化植物。因为在这个模型中我们有诸如mosfet和PWM开关的不连续,模型不能解析线性化。然而,这是可以的,因为这正是我们之前进行频响估计的原因。我们现在可以简单地将PID调谐器指向估计的频率响应。
PID调谐器利用这个频率响应计算PI增益,以提供快速和稳定的闭环系统运行。我们可以使用滑块来调整带宽和相位裕度。我们将调优约3.760 kHz的带宽和60度的相位裕度,以保持稳健的电流参考跟踪。
现在,我们可以将计算得到的PI增益更新到模型的PI块中。
内部电流回路调好后,我们将重复此过程来调好外部电压回路。在控制子系统中,这里的常量块1表示电感电流要求。在我们最终的模型中,这个信号将由外部电压回路计算。对于调优外环,我们的输入线性化点是这个信号,输出线性化点是输出电压信号。
模拟在0.4秒左右达到稳态,因此我们将告诉线性分析工具在该时间左右开始频率响应估计。我们将固定阶跃正弦流信号采样时间设置为0.2微秒,交流频率扫描范围从10Hz到5kHz。摄动的振幅被设置为0.1,以确保足够的激励。现在我们可以运行该工具并计算调优外环的频率响应。
接下来,就像我们对内环所做的一样,我们将用电压PI控制器设置外环控制子系统,并通过启动PID调谐器开始整定。同样,与我们对内环所做的类似,我们导入先前估计的频率响应来计算PI增益。电压环比内部电流环慢,所以我们将带宽设置为55赫兹左右,并保持相位裕度在60度。有了这个选择的带宽,控制器将遵循参考电压,同时拒绝整流交流源的120Hz振荡。
然后我们用计算得到的增益更新电压PI控制器。为了验证非线性模型中的性能,让我们运行参考电压的阶跃变化。仿真结果表明该控制器具有鲁棒性。
现在让我们把电压源切换回原来的交流电网并运行模拟。
我们可以看到,电感电流和输出电压分布显示良好的参考跟踪。从交流电网绘制的线电流类似于一个完美的正弦曲线,比我们在控制器调谐前的电流剖面好得多。我们看到谐波减少,从而提供了更好的功率因数。
总之,在本视频中,我们展示了如何在Simulink中模拟、设计和调优功率因数校正的数字控制算法。万博1manbetx设计完成后,下一步应该是从Controls子系统生成代码,然后将其部署到一个嵌入式控制器上,用物理设备进行测试。视频到此结束。