你好。各位下午好。非常感谢您的友好介绍,古鲁。另一件事是,是的,你的会议为我将要介绍的内容设置了一个很好的背景。所以我的名字是希瓦兰。我是Ather Energy控制和系统情报团队的一员。
首先我要介绍一下我们公司的业务。之前的一分钟视频让你们大致了解了我们的产品。2013年,Tarun Mehta和Swapnil Jain在金奈成立了这家公司,他们都是从ITT马德拉斯毕业的。
然后我们在2015年搬到班加罗尔。你看到的这个特殊的滑板车在2018年6月5日推出。我们在2018年9月11日发布了第一个踏板车。这些是您也可以找到的一些规格网站。但本质上,它是一种高性能,智能,智能电动滑板车,具有一堆功能,您还可以在您的应用程序上访问所有滑板服务器信息。
这是- - - - - -
见点。点是电动车充电器。您将在您最喜欢的饮水店,在您最喜欢的浇水孔中找到您最喜欢的咖啡厅,餐厅,餐厅,餐厅。馊主意。
简单地说,你离一个点永远不会超过4公里。点给你的车充电很快。它很简单,能照顾到细小的东西。有一辆电动汽车?没有问题。如果是S340,你可以在应用程序或仪表盘上找到Point。
如果你看不出要点,就自己找一个。我们从一些开始。但你很快就会在你所在的城市、其他城市和其他城市发现更多。阿瑟电网,一个电动汽车充电网络。
因此,当我们开始设计滑板车,特别是电动滑板车时,我们意识到,与汽油铺位不同,整个城市没有那么多的充电基础设施。这就是我们开始建造的另一个东西。我们想在全市范围内建立一种充电基础设施,这样消费者在骑摩托车时就不会感到距离焦虑。您看到的小型收音机是我们开发的另一种产品,它是充电基础设施。因此,班加罗尔的各个地区也安装了这种装置。
现在,说到我在厄瑟尔做什么。
如果滑板车是智能的,那不是很好吗?如果他们已经知道你要去哪里以及到达那里的最佳方法。如果他们能在结果出现之前就解决问题,如果他们甚至能从任何地方更新自己。如果他们在后台完成了所有这些,我们所要做的就是按一个简单的按钮。
如果他们能让自己变得更简单,如果他们能让拥有摩托车的所有麻烦消失,我们就能享受这个过程。那太好了。
好吧。这让我们对我在厄瑟做的事情有了一个简短的了解。就像我说的,我在软件和情报团队工作,我在控制和系统情报团队工作。我已经给你们展示了很多关于产品的东西;市场营销已经够多了。现在我要讲一下我们是怎么做到的。
作为一个创业公司,我们很多人要么是新鲜的,要么是非常年轻的工程师。没有其他大公司拥有的资源,我们面临着很多挑战。因此,我将简要地向你们介绍我们所面临的挑战。然后告诉你们我们是如何一个一个地克服它们的。
所以我们在产品中首先要瞄准的目标是我们希望它非常以客户为中心。因为这是一种全新的踏板车,它比你现有的所有踏板车都要强大得多。它还有很多其他功能。
比如导航,你从来没在你的两轮车上见过导航。这是我们想要的另一个特性。所有这些都显示出我们滑板车的特点是顾客至上。
因此,这增加了一个挑战,那就是我们必须解释的事情太多了。就像我说的,当我们开始设计电动滑板车时,我们意识到城市里没有充电基础设施。于是我们着手设计城市的充电基础设施。
当您设计收费基础架构时,您必须了解我们如何为电池充电。以一种让电池充电的最佳方式是你知道你不知道你的电池或充电器的方式,但同时客户应该能够足够快地收费吗?所以那些相互矛盾的情况,有很多矛盾的情况。
第二个是缺乏基准数据。由于这是第一个,我们并不是真的,我们没有真正拥有基准数据,我们可以说这就是这样,这就是我们需要改进的东西。在那里,我们再次为我们的复杂的东西是我们不知道消费者最终使用该产品。
因为这将是第一次设计的,由客户使用第一次,我们不知道如何决定如何发生产品的使用情况。因为那是什么结果是我们不知道我们应该停止设计的目的。我们不想过度设计,因为我们认为可能会每天骑25公里。
我们认为,在班加罗尔这样的大城市,人们每天大概要骑20到25公里的车,上上下下。但这可能不是真的。对吧?类似这样的事情。
同样,在充电方面,我们不知道电动汽车是如何充电的,它们在哪里充电。这类基准数据对电动汽车来说是不存在的。所以使用模型是非常困难的。这再次导致了复杂的系统设计。
测试挑战,正如我所提到的那样,我们是一个年轻的创业公司,具有一大堆非常年轻的工程师,而不是很多资源。显然,有很多投资者压力。对于来自初创公司的人来说,你知道环境是什么样的。所以挑战总是在那里。最后但并非最不重要的,就像我说的那样,我们想向我们的滑板车添加一堆子系统和功能。这样,再次使系统复杂化。因为你现在需要处理的互动太多。
那么我们做了什么?如此广泛地,有两部分。一个是我们去做的事情 - 所以这就是我说的那样,无论何种Guro谈到早期的讲话,那么它的正确上下文。因为我们处于一个非常类似的情况下,任何系统架构师或系统工程师都会进入。
所以我们要做的第一件事就是做一个摩托车的物理模型。这对我们的概念选择很有帮助。我们需要使用什么样的冷却方案?万博 尤文图斯我们需要用什么,比如,我们用什么悬挂?对于所有这些,我们实际上建立了我们建立的物理模型来帮助我们设计它们。
组件大小,就像我说的,在之前的广告中你会看到它说射程是75公里,0到40乘以3.9秒,等等。这些都是客户的担忧。但在此基础上,我们最终需要决定,好吧,电机的功率应该是多少?我们电池的能量容量应该是多少?对于这些,我们建立的物理模型帮助我们得出这些。
显然,我们实施的算法,控件算法,et cetera,等等,显然是我们构建的物理模型是那些算法的第一点。因为我们会像模拟的模拟一样。所以我会进入其中的细节。
我们做的第二大块工作是算法开发。所以需要很多不同的算法。因为现在你有一堆独立的分量。你有一个电池。你有一个马达。你有一个变速器。你已经暂停。现在你需要弄清楚如何使这些工作在一起。
因此,我们需要设计一堆算法,在这些组件上,确保作为一个系统,性能是最优的。所以我们有一堆管理算法。我们有一堆控制算法可以控制电池的温度,电压。
而我想在这里提到的其他重要作品是我们必须设计一堆过滤器。所以我的意思是,这里有过滤器。所以,因为那个,我们不得不在那边使用 - 所以涉及的复杂量也很高。
接下来,MathWorks是如何帮助我们的呢?对于电动滑板车的物理建模,MATLAB, Simulink, Stateflow显然是你的首选。万博1manbetx除此之外,我们还使用了Simscape平台上的一些工具箱。我们做了电池模型。我们做了马达的模型。当我们需要做大量的黑盒建模时,最后两个非常有用。
所以在很多情况下,对所有组件进行基于第一性原理的物理建模并不容易。也许你可以,但要花很多时间。即使这需要花费很多时间,也许要将准确率从80%提高到81%,也许你需要花费大量的时间和资源。所以在这一点上,你决定也许不值得像第一原理模型那样做。这就是你决定的地方,好吧,也许我们可以做经验模型。
所以你设计了一系列的测试。一旦你做了这些测试,你现在怎么说你有了某种曲线拟合?但是我们想做的是类似于系统识别的事情,所以你有一堆输入和一堆输出。你知道工具箱告诉你输出和输入的关系。
参数估计,再次,对于我们没有真正的组件的组件,我们使用该系统在该系统中的子组件究竟如何运作的情况下,我们使用参数估计。所以我们建立了一个非常基本的第一原理物理模型。我们做了一堆测试,获取输入,获取输出。现在尝试将此输入和输出拟合到该特定模型。这将告诉我们参数A是如此。参数B是如此。因此,它是一种略有不同的系统识别方法。
说到算法开发,像往常一样,我的MATLAB, Simulink, Stateflow是我们的第一个切入点。万博1manbetx除此之外,我们还使用了信号处理工具箱。就像我之前提到的,我们必须设计一堆过滤器。为此,我们使用了信号处理工具箱。控制系统工具箱,我们显然需要任何类型的控制算法设计。
并发布,一旦我们实际上在Matlab和Simulink平台上有了工作算法,最明显的事情就是直接从中生成代码并将其移植到微控制器。万博1manbetx因此,根据算法的环境,我们要么使用MATLAB或Simulink编码器,以及在某些情况下嵌入式编码器。万博1manbetx
就像我说的那样,我会详细介绍我谈过的两桶。第一个是电动滑板车的物理建模。所以在这方面,我们所熟悉的基本上是一个平台,我们能够在这种情况下模拟我们认为影响的所有三件事,正确的速率。
在我们的案例中,产品是滑板车。我们想知道,如果车辆从A点开到B点,具体情况如何,你们通常知道,好,我举个例子。假设你开车去怀特菲尔德的家。现在我们不知道这段旅程到底会是怎样的。所以我们做的第一件事是我们在一群员工的踏板车上部署了一个非常简单的数据采集系统。我们让他们骑着车在城里转悠。
有了这些数据,在数据科学团队的帮助下,我们想出了一个有代表性的驾驶周期。所以我们的自行车在早上的时候是一个好斗的骑手,在晚上是一个温和的骑手。我们有这些代表性的驾驶周期。
因为如果没有这些驱动周期,或者作为一个更广泛的话题,我所说的使用模型,很难决定,如何设计一个特定的系统?一旦我们得到了这些驱动循环,我们就把它们放到模型中。然后我们会看看各个组件的各个方面,看看它是否在应该保持的范围内表现良好,等等等等。
如此明显,物理建模,我们必须详细介绍所有组件。就像我说的那样,在某些情况下,我们选择进行实证建模。所以在环境模型中,就像我说的那样,我们有开车循环模型,环境温度模型,道路梯度,道路起伏。显然我们也不得不照顾环境温度。
我们想看看电池在夏天和冬天的性能,以及我们是否要把它带到另一个城市。所以现在,这种产品只在班加罗尔有售。但很快我们就要把它运到钦奈和浦那了。所以我们想知道,金奈和浦那通常比较热,我们想看看电池温度是否在控制范围内。因此,我们需要某种环境温度模型。
道路坡度模型,了解城市周围存在什么样的坡度,了解模型在区域内是否具有爬坡能力。因为我们必须设计相应的电机转矩。我们根据收集的数据得出了这个结论。
我们还必须根据攻击性进行分类,因为对于攻击性骑手来说,这个系统通常会更低效。所有这些低效率通常都以热量的形式释放出来,这意味着你的部件会受到更多的热压力,温度会升高。我们想要确保这些也在可控范围内。
然后来车。我谈到了环境和司机,现在来到车辆。我们有电池的型号。我们对电机和控制器,外围设备,车辆动态进行了模型。而另一个大块是控制算法。所有的控制算法,我讨论了关于早期和其他人,这些算法可能会稍微微不足道,所有这些都是一个块。
正如我提到的,模型有两种。你可以选择第一原理模型。或者是数据驱动的模型,或者两者兼而有之。
再一次,就像我提到的,在飞行器模块中,有这种分裂以及各个子系统是如何相互作用的。现在你们可能会问我们是否进行了验证。建立一个模型是很棒的。但除非得到验证,否则就没用了。
所以,一旦我们准备好了最初的原型,我们实际上做了一系列的骑乘,有控制的也有不控制的,就像我所说的。最初控制是因为我们想验证我们的模型,至少是针对某种控制,以便我们知道其余的参数,它们是如何变化的。所以,一开始,是一堆受控的游乐设施。
然后,一旦我们从该数据验证获得数据,就会意识到模型关闭。在骑行的所以部分,它表现不佳。我们有点精细调整它。所以这是一个非常迭代的运动。
说到算法开发,我们大多数人都熟悉V循环,我们通常遵循软件实现。我们不得不采用一种稍微不同的方式。这看起来不像V,但它可能是,如果你真的通过它,它可能只是一个V循环,看起来有点不同。
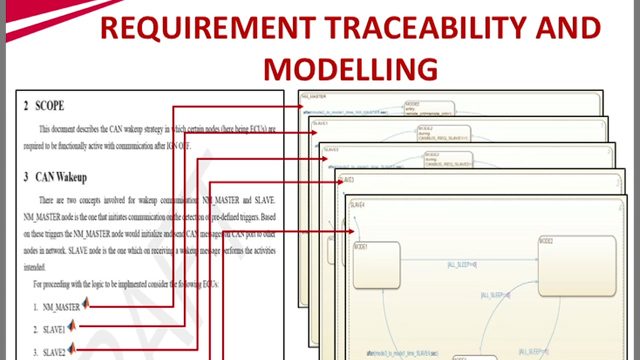
就像我说的,我们将建立电动滑板车的物理模型。我们在文档中有很多需求。我们再次在MATLAB, Simulink, Stateflow环境下建立了算法模型。万博1manbetx把这两者放在一起,做了一堆闭环模拟,我称之为建模循环。
发布,我们转到同一阶段。在代码生成之后,我们做了一堆软件和循环模拟,以查看代码和模型之间是否存在一致性。但是,这也是在Matlab环境本身上完成的。
但你们大多数人可能会指出,V循环有更多的方面。但是就像我提到的,对于我们所拥有的约束条件,我们必须限制我们作为过程使用的东西。我讲了下一个设计的计划。希望在这里,我们会讲到V循环的其他方面,这将是非常有用的工具。
来到关键的外卖。就像我说,测试时间,测试努力,资源始终是一个挑战,即使是一家大公司。你可以想象它对我们来说有多大挑战。因此,此模型加上模型的设计加算法开发还有很长的路要降低测试工作。因为我说,在模型环境或非常受控的设置中完成了一系列模拟。
所以我们可以做的是而不是像100例一样测试,可能我们会做一堆模拟,这可以更快地运行很多。也许只有,让我们说该模型无法捕获,因为它的准确性,也许让我们说这无法捕捉到某些方面,让我们说,电池或电机。然后在那种情况下,只有那些10个测试用例就是我们实际去的东西。这样我们就可以节省大量的测试时间。
第二个是增加了实现复杂算法的难度。所以通常在软件中,你的算法会很复杂。如果您还必须手工编写代码,那么会增加额外的复杂性。因此,我们能够很好地使用这些产品的一个原因是,我们将所有的精力都集中在了使算法复杂化上,因为我们不想再担心现在手工编码的问题。s manbetx 845
否则,这就像你必须解决的两步问题。所以我们把所有的精力都集中在算法开发上。然后发布,一旦我们觉得算法足够好,我们就会,点击一个按钮,我们就会得到嵌入的C代码。然后我们将继续进行集成和测试过程。
因此,现场问题很快得到解决。任何新产品都会有问题。所以当我们在9月份发货的时候,我们一开始确实遇到了一些问题。再次,基于模型设计的帮助我们很多,因为一个框架模型,物理模型以及算法的模型,因为他们都是在一个框架中,我们确实想退出字段数据,通过模型玩回来,看看模型或算法哪里表现不佳。我们可以快速修正错误。因为你们之前已经看到了,这个,我们有ODS软件更新能力。因此,我们能够立即修复客户车辆上的问题。
另一件我觉得很有帮助的事情是因为Simulink,所以在我看来,当你在Simulink或Stateflow之类的环境中使万博1manbetx用你的算法时,它也是自我记录的。因为你不必刻意去记录这些。因为它已经是图形化的了。从某种意义上说,它已经非常像一个流程图,某种自我记录。
所以再次帮助我们的是,在通过算法的导航方面,让我们说我设计了ALGO,但其他人必须解决这个问题,因为也许我没有。因为算法已经处于图形形式,因此可以容易地易于可读性,可追溯性,通过代码导航。如果它不是文本的形式,所有这些都变得更加容易。所以我认为这是一个真正的关键外卖之一。
所以我提到,至少第一代滑板车,也就是奥瑟450和340,我们关注的基于模型的设计领域主要是提出一个准确的工厂模型。其次,对算法进行了开发。我可能忘了说的一件事是现在我们有了很多现场数据,我们显然可以微调我们的算法,所有我在第二点提到的事情。有了ODS的软件更新能力,我们可以用更先进的算法更新摩托车。这是我们的第一代滑板车。
现在,我们已经开始了第二代滑板车的研发工作。我们在这里要做的是,现在我们不必从头开始构建工厂模型。我们已经有了一个运转良好的工厂模型。它只是根据我们得到的现场数据对某些事情进行微调。
第二个是对我们来说非常重要的事情,因为就像我说的那样,当我们开始建立我们的第一个产品时,我们没有像基准数据一样说,这就是如何使用踏板车,这就是它的方式跑步,这是它将被充电,类似的东西。
但现在我们已经有了相当多的摩托车,我们可以利用现场数据。这就形成了我们使用模型的核心。所以,希望当我们设计下一款踏板车时,我们会以此为基础——假设我们在第一代踏板车上过度设计了一些东西。然后我们就能减少这个了。
第三位基本上最大化MBD用于软件的使用。所以在第一代中,正如我所提到的那样,我们的主要焦点区域正在使用MBD来提出一个非常好的植物模型,并使用它类似于复杂的算法。但现在我们打算做的是,因为我们在使用基于MBD的方法时,我们已经看到了我们得到的容易,我们计划最大限度地在许多固件中使用基于模型的设计。
差不多就是这样了。谢谢你!