在这个演示中,我们将看到如何使用Simscape fluid建模液压驱动系统。在我们的液压驱动系统模型中,该阀内的阀芯控制从泵到液压缸两侧的压力流动,液压缸可以伸缩。电机驱动泵轴控制转速,控制系统调节阀门的位置。
我们将在Simulink中对这个系统进行建模万博1manbetx®环境使用Simscape流体。我们建立的模型是这样的,当我们运行我们的模拟时,我们会看到活塞的整个行程范围。然后,我们将把它与一个三维机械系统的现实模型连接起来,看看它的表现如何。现在切换到模型,你们可以看到这是怎么做的。
首先,我们将在MATLAB中输入命令ssc_new®命令窗口。这将打开一个带有Simscape模型推荐万博1manbetx设置的Simulink模型。我们需要加入系统的第一个东西是泵。我将点击图表,并输入单词泵。这里我可以看到我可以选择的泵的列表,我将选择一个定排量泵。我可以在这里指定泵的排量。
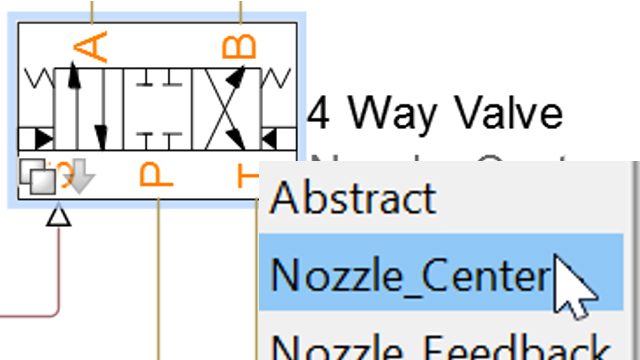
我们的水泵需要从水箱中抽取液体。我们将用一个液压参考来表示。我点击并拖动创建一个理想的液压连接,类型参考,这里我有一个理想的液压参考,它将代表我们的油箱。为了控制流体从泵到液压执行器的流量,我们需要一个换向阀。我会输入4,然后从可用的方向阀中选择一个。
双击块,我可以进入并指定不同的参数。有多个参数化选项,所以我可以选择一个适合我拥有的数据表,或者我可以使用一个适合测量数据。我将增大这个阀门的通径,使其与泵的通径相称,其余的设置保持不变。
我将把我们阀门的P口连接到泵的高侧。我们需要限制来自泵的压力。我们将使用减压阀来做到这一点。我将右键单击并拖动创建一个液压分支,然后输入安全阀来获得组件。双击这个块,我也可以改变这些参数。我会调整它们,使它们与我们正在使用的泵和阀门的尺寸相称。我将把安全阀的下端接回油箱。我还要把液压换向阀的低侧也连接到油箱上。
接下来,我们将添加液压执行器。我将点击和拖动创建一个液压连接,并输入气缸。这里我们可以看到我们可以使用的不同的圆柱体组件。我将把这个组件放入我们的网络中,创建额外的液压连接,然后双击区块来设置参数。我们需要把促动器做大一点来处理我们的反铲臂。
我们将改变活塞冲程,以配合我们的系统设计。我们将改变硬停止参数。这两个机械连接代表我们的圆柱体的机械连接。我们把这个点和空间中的一个固定点连接起来。另一边是连杆,连杆与气缸中的活塞相连。我们希望这种作用能抵抗机械载荷。我们将点击和拖动来创建一个机械连接,然后添加一个平移弹簧。
我们想要圆柱作用于弹簧阻尼器,所以我们将点击和拖动,并添加一个平移阻尼器。我们把这条边连接到一个空间固定的点上。为了指定负载的惯性,我们将点击并拖动,并添加一个质量块,并设置质量为100公斤。
我们的物理系统是完整的,但我们仍然需要指定系统的输入。一个输入是我们的泵。我们将点击和拖动来创建一个机械连接。我们将插入一个理想的角速度源,以使我们的泵以固定的速度旋转。这个源的另一边,我们将连接到空间中的一个固定点上。我们将使用常数块指定泵的速度。
我们指定它的速度为,每秒188弧度。因为Simscape和Simscape流体使用的求解器技术超过了基础Simulink中可用的技术,所以我们需要访问额外的设置。万博1manbetx我们可以在Solver配置块中访问这些。我们系统的剩余输入是阀芯和阀门的位置。我们将使用Simulink信号来指定。万博1manbetx我们需要指定信号的单位,我们会用这个转换块来做。
这里我们可以指定信号的单位为米,或阀内阀芯的位移。为了使活塞在整个行程范围内运动,我们将使用正弦波作为输入。我们将振幅指定为3毫米。我们要做的最后一件事是指定液压油。我们将点击并拖动来创建一个分支。然后插入一个液压油块。在这里,我们可以指定流体的类型,并指定任何其他相关参数。
有了这个,我们的液压网络就完成了。我们要做的最后一件事是确保启用Simscape日志记录。在Simscape窗格下的Configuration面板中,我们可以启用Simscape日志记录。我们还可以设置其他设置,以配置如何保存它。现在我们可以运行模拟。然后右击任意块,我们就可以访问Simscape Results Explorer。
在这里,我们可以看到一个显示所有模拟结果的树状浏览器。因为我们右击了平移弹簧,我们可以看到不同的值,包括弹簧被压缩的距离或者活塞移动了多少。我们看到它移动了它的整个行程0.5米。我们也可以看到这个驱动系统所能提供的力。
我们还可以探索液压量,如泵需要传递的压力。我们对系统在这个非常简单的负载下的表现感到满意。现在我们将添加一个更现实的负载。我们建立了一个三维机械系统的模型,铲斗和手臂,在我们的挖土机。连接这里的机械连接,然后把我们放在一起的子系统的输出连接到一个模拟范围块。
当我们运行模拟时,我们会看到机械系统的3D动画。我们可以看到驱动系统在前后移动水桶。当我们看这个范围时,我们可以看到我们的系统在整个运动范围内移动。当我们进入Simscape多体系统的模型时,我们还可以使用Simscape Results Explorer来探索数量。这里我们可以看到这个关节的运动学量。在这个演示中,我们看到了如何使用Simscape fluid建模液压驱动系统。