理解卡尔曼滤波器
发现您可以使用卡尔曼滤波器的实际情况。卡尔曼滤波器常用于在不确定和间接测量的情况下对系统的内部状态进行最优估计。通过观看下面的介绍性示例,学习Kalman过滤器背后的工作原理。
您将探索通常使用卡尔曼滤波器的情况。当一个系统的状态只能被间接地测量时,你可以使用一个卡尔曼滤波器来优化地估计系统的状态。当来自不同传感器的测量数据是可用的,但受到噪声影响时,您可以使用卡尔曼滤波器来组合来自不同来源的感觉数据(称为传感器融合),以找到感兴趣的参数的最佳估计值。
您还将通过一些包含简单数学的示例了解状态观察者。这将帮助您理解什么是卡尔曼滤波以及它是如何工作的。在高层次上,卡尔曼滤波器是一种最优状态估计器。视频还包括非线性状态估计器的讨论,如扩展的和无气味的卡尔曼滤波器。
最后,一个例子说明了如何使用卡尔曼滤波器,MATLAB估计线性系统的状态®和仿真软件万博1manbetx®。

第1部分:为什么使用卡尔曼滤波器?通过一些示例了解卡尔曼滤波器的常见用法。卡尔曼滤波器是一种用于从间接和不确定的测量中估计系统状态的最优估计算法。

第二部分:国家观察员学习状态观察者的工作原理,并发现它们背后的数学原理。当您无法直接测量系统的内部状态时,状态观察器用于估计系统的内部状态。
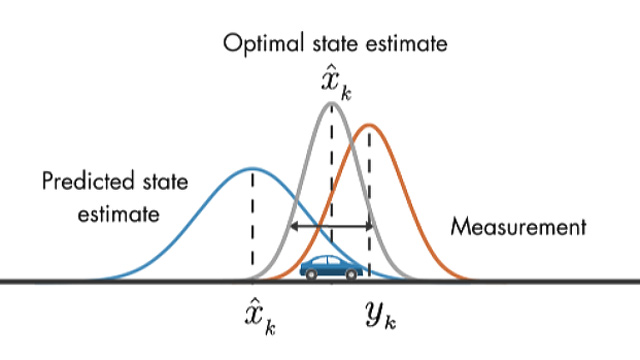
第3部分:最优状态估计学习卡尔曼滤波的工作原理。卡尔曼滤波器将预测状态和噪声测量这两个信息源结合起来,得到最优的、无偏态的状态估计。
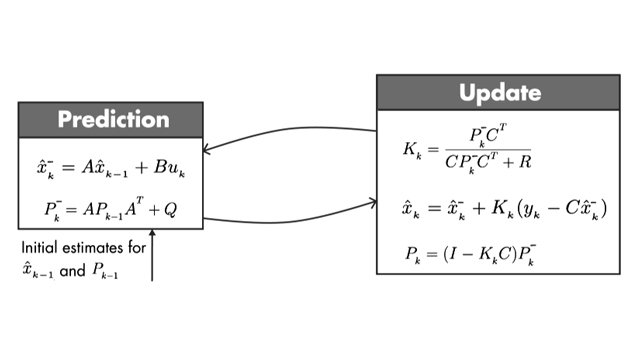
第4部分:最优状态估计算法发现一组方程,你需要实现卡尔曼滤波算法。
第5部分:非线性状态估计本视频介绍非线性状态估计器背后的基本概念,包括扩展卡尔曼滤波器、无迹卡尔曼滤波器和粒子滤波器。
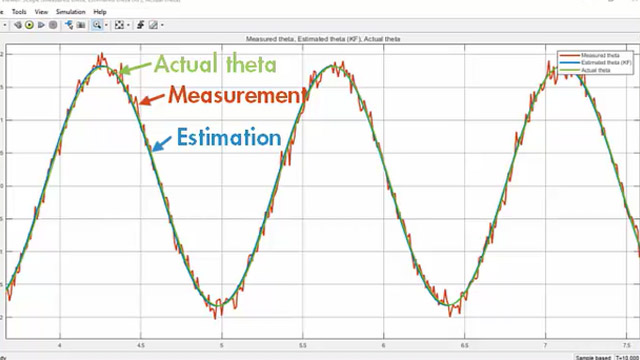
第6部分:如何在Simulink中使用卡尔曼滤波器万博1manbetx利用Simulink中的卡尔曼滤波器估计单摆系统的角位置。万博1manbetx您将了解如何配置卡尔曼滤波块参数,如系统模型、初始状态估计和噪声特性。
第7部分:如何在Simulink中使用扩展的卡尔曼滤波器万博1manbetx利用扩展卡尔曼滤波器估计非线性摆系统的角位置。您将学习如何指定扩展的卡尔曼滤波块参数,如状态转换和测量函数,并生成C/ c++代码。
你也可以从以下列表中选择一个网站: