视觉检测发电机
通过视觉测量检测物体和车道
- 库:
自动驾驶工具箱/驾驶场景和传感器建模
描述
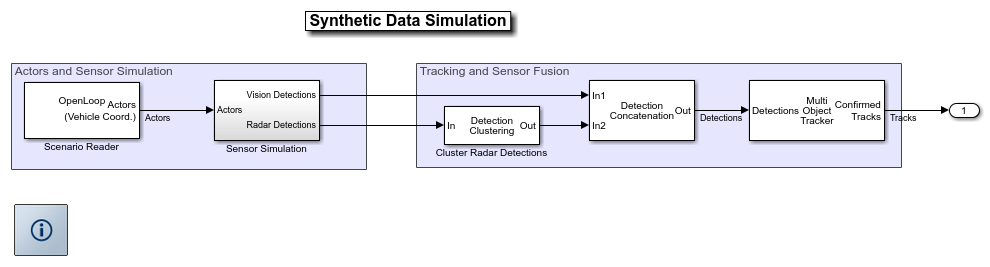
的视觉检测发电机块从安装在自助车辆上的视觉传感器拍摄的摄像机测量中产生检测。
该模块从模拟的actor姿态中获取检测,并以等于传感器更新间隔的时间间隔生成这些检测。默认情况下,检测参考ego车辆的坐标系统。该块可以模拟真实的检测添加了随机噪声,也产生假阳性检测。统计模型产生测量噪声、真检测和假阳性。控件上的随机数生成器设置可控制统计模型生成的随机数测量块的标签。
你可以使用视觉检测发电机创建输入多目标跟踪块。使用该方案和传感器模型时驾驶场景设计师应用程序,摄像头传感器导出到Simulink万博1manbetx®输出为视觉检测发电机块。
港口
输入
演员-场景演员的姿势
万博1manbetxSimulink总线包含MATLAB®结构
场景演员在自我车辆坐标中姿势,指定为包含MATLAB结构的Simulink总线。万博1manbetx
结构必须包含这些字段。
| 场 | 描述 | 类型 |
|---|---|---|
NumActors |
许多演员 | 非负整数 |
时间 |
当前仿真时间 | 实值标量 |
演员 |
演员的姿势 | NumActors- 演员姿势结构的长度阵列 |
每个演员的姿势结构都在演员必须有这些字段。
| 场 | 描述 |
|---|---|
ActorID |
场景定义的参与者标识符,指定为一个正整数。 |
位置 |
行动者的位置,指定为形式的实值向量[xyz].单位是米。 |
速度 |
速度(v)的演员x-y- - - - - -,z- 指定为表格的真实值矢量[vxvyvz].单位是米每秒。 |
卷 |
作用器的滚转角,指定为实值标量。单位是度。 |
球场 |
作用器的俯仰角,指定为实值标量。单位是度。 |
偏航 |
作用器的偏航角,指定为实值标量。单位是度。 |
AngularVelocity |
角速度(ω)的演员x-,y- - - - - -,z- 指定为表格的真实值矢量[ωxωyωz].单位是每秒度。 |
依赖关系
要启用此输入端口,请设置传感器产生的检测类型参数对象只,车道与闭塞,或车道和对象.
车道边界- 车道边界
万博1manbetxSimulink总线包含MATLAB结构
车道边界在ego车辆坐标中,指定为包含MATLAB结构的Simulink总线。万博1manbetx
结构必须包含这些字段。
| 场 | 描述 | 类型 |
|---|---|---|
NumLaneBoundaries |
车道边界数 | 非负整数 |
时间 |
当前仿真时间 | 真正的标量 |
LaneBoundaries |
车道边界 | NumLaneBoundaries车道边界结构的长度数组 |
各车道边界结构在LaneBoundaries必须有这些字段。
| 场 | 描述 |
|
车道边界坐标,指定为一个真实值N3矩阵,N为车道边界坐标的个数。车道边界坐标定义了边界上点的位置,在指定的纵向距离上,沿着道路的中心。
这个矩阵还包括与自我飞行器零距离处的边界坐标。这些坐标是左和右的自我车辆原点,这是位于中心的后桥。单位是米。 |
|
每一行的线边界曲率坐标矩阵,指定为实值N1的向量。N为车道边界坐标的个数。单位是弧度/米。 |
|
的每一行的车道边界曲率的导数坐标矩阵,指定为实值N1的向量。N为车道边界坐标的个数。单位是弧度每平方米。 |
|
初始航道边界航向角,指定为实标量。车道边界的航向角是相对于自我的车辆航向的。单位是度。 |
|
车道边界到自我车辆位置的距离,指定为实标量。自我车辆左侧的车道边界偏移量为正。自我载体右侧的偏移量为负。单位是米。 |
|
行车线界线标记的类型,指定为以下值之一:
|
|
车道边界标记的饱和强度,指定为从0到1的实标量。的值 |
|
车道边界宽度,指定为正实标量。在双线车道标记中,两条线以及线与线之间的空间使用相同的宽度。单位是米。 |
|
虚线中虚线的长度,指定为正实标量。在双线车道标记中,两线使用相同的长度。 |
|
虚线中虚线之间的空格长度,指定为正实标量。在虚线双线车道标记中,两行使用相同的空间。 |
依赖关系
要启用此输入端口,请设置传感器产生的检测类型参数只道,只道,车道与闭塞,或车道和对象.
输出
对象检测- - - - - -对象检测
万博1manbetxSimulink总线包含MATLAB结构
对象检测,作为包含MATLAB结构的Simulink总线返回。万博1manbetx有关公共汽车的更多详细信息,请参阅创建Nonvirtual公交车(万博1manbetx模型).
您可以将这些传感器和其他传感器的对象检测传递给跟踪器,例如多目标跟踪块,并生成轨道。
检测结构有如下形式:
| 场 | 描述 | 类型 |
|---|---|---|
numdetections. |
数量的检测 | 整数 |
IsValidTime |
在块调用间隔之间请求更新时为False | 布尔基 |
检测 |
对象检测 | 对象检测结构的长度由所设置的数组报告检测的最大数目参数。只有numdetections.这些探测都是实际的探测。 |
对象检测结构包含这些属性。
| 财产 | 定义 |
|---|---|
时间 |
测量时间 |
测量 |
对象的测量 |
MeasurementNoise |
测量噪声协方差矩阵 |
SensorIndex |
传感器的唯一ID |
ObjectClassID |
对象分类 |
ObjectAttributes |
附加信息传递给跟踪器 |
MeasurementParameters |
非线性卡尔曼跟踪滤波器初始化函数所使用的参数 |
的测量场报告在指定的坐标系中测量的位置和速度用于报告检测的坐标系统.该字段是表格的真实禁区向量[x;y;z;vx;v;vz].单位是米每秒。
的MeasurementNoise字段是一个6乘6的矩阵,报告每个坐标的测量噪声协方差测量字段。
的MeasurementParameters字段是具有这些字段的结构。
| 参数 | 定义 |
|---|---|
框架 |
枚举类型,指示用于报告度量的帧。的视觉检测发电机阻止在自我和传感器架坐标中检测,这是矩形坐标帧。因此,对于这个块,框架总是设置为“矩形”. |
originosition. |
传感器原点与自我车辆原点的三维矢量偏移量。向量是由传感器的(x,y)位置(m)和传感器的高度(米)块的参数。 |
取向 |
视觉传感器坐标系统相对于自我车辆坐标系统的定位。方向是由车载传感器偏航角(deg),车载传感器俯仰角(deg),车载传感器侧倾角度(deg)块的参数。 |
HasVelocity |
指示测量是否包含速度。 |
的ObjectAttributes属性的每个检测是一个结构与这些字段。
| 场 | 定义 |
|---|---|
TargetIndex |
参与者的标识符,ActorID,产生检测。对于误报,此值是否定的。 |
依赖关系
要启用此输出端口,请设置传感器产生的检测类型参数对象只,车道与闭塞,或车道和对象.
车道检测-车道边界检测
万博1manbetxSimulink总线包含MATLAB结构
车道边界检测,返回为包含MATLAB结构的Simulink总线。万博1manbetx该结构有以下字段:
| 场 | 描述 | 类型 |
|---|---|---|
时间 |
车道检测时间 | 真正的标量 |
IsValidTime |
在块调用间隔之间请求更新时为False | 布尔基 |
SensorIndex |
传感器唯一标识符 | 正整数 |
NumLaneBoundaries |
车道边界检测次数 | 非负整数 |
LaneBoundaries |
车道边界检测 | 的数组clothoidLaneBoundary对象 |
依赖关系
要启用此输出端口,请设置传感器产生的检测类型参数只道,车道与闭塞,或车道和对象.
参数
参数
传感器识别传感器唯一标识符-唯一传感器标识符
1(默认)|正整数
独特的传感器标识符,指定为正整数。传感器标识符区分多传感器系统中不同传感器的检测。如果模型包含具有相同传感器标识符的多个传感器块,则鸟瞰显示一个错误。
例子:5
传感器产生的检测类型—选择检测类型
对象只(默认)|只道|车道与闭塞|车道和对象
传感器产生的检测类型,指定为对象只,只道,车道与闭塞,或车道和对象.
当设置为
对象只,没有道路信息被用来遮挡演员。当设置为
只道,不使用行动者信息来检测车道。当设置为
车道与闭塞时,摄像机视场中的行动者会削弱传感器检测车道的能力。当设置为
车道和对象,传感器产生对象检测和封闭车道检测。
需要的传感器更新间隔-所需时间间隔
0.1(默认)|正实标量
传感器更新之间所需的时间间隔,指定为正实标量。该参数的值必须是该参数的整数倍演员输入端口数据间隔时间。在更新间隔之间从传感器请求的更新不包含检测。单位是秒。
车道检测更新所需的间隔时间-车道检测更新的时间间隔
0.1(默认)|正实标量
车道检测更新之间需要的时间间隔,指定为正实标量。定时调用视觉检测发生器。视觉检测器以该参数定义的时间间隔生成新的车道检测,该参数必须是模拟时间间隔的整数倍。在更新间隔之间从传感器请求的更新不包含车道检测。单位是秒。
传感器的(x,y)位置(m)-视觉传感器中心位置
3.4 [0](默认)| 1 × 2实值向量
视觉传感器中心的位置,指定为1 × 2实值向量。的传感器的(x,y)位置(m)和传感器的高度(米)参数定义视觉传感器相对于自我车辆坐标系统的坐标。默认值对应于安装在轿车仪表板上的前向视觉传感器。单位是米。
传感器的高度(米)-视觉传感器离地平面的高度
0.2(默认)|正实标量
地面平面上方的视觉传感器高度,指定为正实标量。相对于车辆接地平面限定高度。的传感器的(x,y)位置(m)和传感器的高度(米)参数定义视觉传感器相对于自我车辆坐标系统的坐标。默认值对应于面向正面的视觉传感器安装轿车仪表板。单位是米。
例子:0.25
车载传感器偏航角(deg)-传感器偏航角
0(默认)|实标量
视觉传感器的偏航角,指定为实标量。偏航角是飞行器中心线与相机光轴之间的夹角。正偏航角对应于顺时针旋转,当看在正的方向z自我车辆坐标系统的轴。单位是度。
例子:-4.0
车载传感器俯仰角(deg)-传感器俯仰角度
0(默认)|实标量
传感器的俯仰角,指定为实标量。俯仰角是相机光轴与相机之间的夹角x - y自我飞行器坐标系的平面。正俯仰角对应于顺时针旋转,当看在积极的方向y自我车辆坐标系统的轴。单位是度。
例子:3.0
车载传感器侧倾角度(deg)-传感器滚动角度
0(默认)|实标量
视觉传感器的滚转角,指定为实标量。滚动角度是相机光轴绕轴的旋转角度x自我车辆坐标系统的轴。正滚转角对应于顺时针旋转,当看在积极的方向x坐标系的-轴。单位是度。
对象总线名称的来源-对象总线名称的来源
汽车(默认)|财产
对象总线名称的来源,指定为汽车或财产.如果您选择汽车时,块自动创建一个总线名称。如果您选择财产,使用该公共汽车名称指定指定对象总线名称参数。
例子:财产
输出车道总线名称的来源-车道巴士名称的来源
汽车(默认)|财产
输出车道总线名称的来源,指定为汽车或财产.如果你选择汽车,块将自动创建一个总线名称。如果你选择财产,使用该公共汽车名称指定指定对象总线名称参数。
例子:财产
对象总线名称—对象总线名称
有效的总线名称
对象总线的名称,指定为有效的总线名称。
例子:objectbus
依赖关系
要启用该参数,请设置对象总线名称的来源参数财产.
指定输出通道总线名称-输出车道总线名称
有效的总线名称
输出车道总线的名称,指定为有效的总线名称。
例子:lanebus
依赖关系
要启用该参数,请设置输出车道总线名称的来源参数财产.
报告检测的最大数目—最大上报探测数
50(默认)|正整数
传感器报告的最大检测数,指定为正整数。以距离传感器的距离增加到达到最大数量的距离的顺序报告检测。
例子:One hundred.
依赖关系
要启用该参数,请设置传感器产生的检测类型参数对象只或车道和对象.
报告的最大车道数-报告的最大车道数
30.(默认)|正整数
报告的最大车道数,指定为正整数。
例子:One hundred.
依赖关系
要启用该参数,请设置传感器产生的检测类型参数只道,车道与闭塞,或车道和对象.
用于报告检测的坐标系统-报告检测的坐标系统
自我笛卡儿(默认)|传感器笛卡儿
报告检测的坐标系统,指定为以下值之一:
自我笛卡儿-检测报告在自我车辆笛卡尔坐标系统。传感器笛卡儿-检测报告在传感器笛卡尔坐标系统。
模拟使用-模拟运行的类型
解释执行(默认)|代码生成
解释执行-使用MATLAB解释器模拟模型。这个选项缩短了启动时间。在解释执行模式,可以调试块的源代码。代码生成- 使用生成的C / C ++代码模拟模型。第一次运行模拟时,Simulink会为块生成C / C ++代码。万博1manbetx只要模型不会改变,C代码就被重用了用于后续模拟。此选项需要额外的启动时间。
测量
设置最大探测距离(m)-最大探测距离
150(默认)|正实标量
最大检测范围,指定为正实标量。视觉传感器无法检测到此范围之外的对象。单位是米。
例子:250
边界框精度(像素)-边界框精度
5(默认)|正实标量
限定盒精度,指定为正实标量。这个量定义了检测器将边界盒与目标匹配的精度。单位是像素。
例子:9
平滑滤波噪声强度(m/s^2)-用于滤波位置和速度测量的噪声强度
5(默认)|正实标量
用于过滤位置和速度测量的噪声强度,指定为正实标量。噪声强度定义了视觉传感器中使用的内部常数速度卡尔曼滤波器的过程噪声的标准偏差。过滤器使用分段恒定的白噪声加速模型来模拟过程噪声。噪声强度通常是目标的最大加速度幅度的顺序。单位每秒平方米。
例子:2
最大可探测物体速度(m/s)-最大可检测物体速度
One hundred.(默认)|非负实标量
可探测物体的最大速度,指定为非负实标量。单位是米每秒。
例子:20.
最大允许遮挡检测器-最大允许遮挡检测器
0.5(默认)|在[0 1范围内的实标量
对象的最大允许遮挡,指定为范围[0 1]内的实标量。闭塞是传感器不可见的物体的总表面积的分数。值1表示对象完全遮挡。单位是无量纲的。
例子:0.2
物体可检测图像的最小尺寸—物体的最小高度和宽度
[15,15](默认)| 1乘2的正值向量
视觉传感器在图像中检测到的物体的最小高度和宽度,指定为[minHeight, minWidth]正的向量。物体的二维投影高度必须大于或等于minHeight.物体的投影宽度必须大于或等于minWidth.单位是像素。
例子:[20] 25
探测目标的概率-探测概率
0.9(默认)|小于或等于1的正实标量
探测目标的概率,指定为小于或等于1的正实标量。这个量定义了传感器检测到可检测物体的概率。一个可检测物体是满足最小可检测大小,最大范围,最大速度和最大允许遮挡约束的对象。
例子:0.95
每张图像的误报数-每幅图像由视觉传感器产生的错误检测数
0.1(默认)|非负实标量
每幅图像由视觉传感器产生的错误检测数,指定为非负实标量。
例子:1.0
图像中的最小车道尺寸(像素)-车道的最大尺寸
[20,3](默认)| 1 × 2实值向量
在考虑曲率(指定为1 × 2实值向量)后,传感器可以检测到的摄像机图像中投影车道标记的最小尺寸,[minHeight minWidth].车道标记必须超过这两个值才能被检测到。单位是像素。
依赖关系
要启用该参数,请设置传感器产生的检测类型参数只道,只道,或车道和对象.
车道边界精度(像素)-车道边界的准确性
3.(默认)|正实标量
车道边界的精度,指定为正实标量。该参数定义了车道传感器设置车道边界的准确性。单位是像素。
例子:2.5
依赖关系
要启用该参数,请设置传感器产生的检测类型参数只道,只道,或车道和对象.
在测量中添加噪声-启用添加噪声到视觉传感器测量
在(默认)|从
选择此参数将噪声添加到视觉传感器测量中。否则,测量是无噪声的。的MeasurementNoise每个检测的属性始终计算,并且不受您指定的值的影响在测量中添加噪声参数。
选择方法以指定初始种子方法指定随机数生成器种子
可重复的(默认)|指定种子|不可重复的
方法设置随机数生成器种子,该种子指定为表中的选项之一。
| 选项 | 描述 |
|---|---|
可重复的 |
该块为第一次模拟生成一个随机初始种子,并在所有后续模拟中重用该种子。选择此参数可从统计传感器模型生成可重复的结果。要更改这个初始种子,请在MATLAB命令提示符处输入: |
指定种子 |
为可重复的结果指定您自己的随机初始种子使用指定种子参数。 |
不可重复的 |
该块在每次模拟运行后生成一个新的随机初始种子。选择此参数可从统计传感器模型生成不可重复的结果。 |
最初的种子-随机数生成器种子
0(默认)|非负整数小于232
随机数生成器种子,指定为小于2的非负整数32.
例子:2001
依赖关系
要启用该参数,请设置随机数发生器设置参数指定种子.
演员配置文件
选择方法以指定参与者概要文件方法指定角色配置文件
从场景读取器块(默认)|参数|MATLAB的表情
指定演员配置文件的方法,它是驱动场景中所有演员的物理和雷达特征,指定为以下选项之一:
从场景读取器块—块从指定的场景中获取角色配置文件场景的读者块。参数对象上启用的参数获取参与者配置文件演员配置文件标签。从工作空间块从指定的MATLAB表达式中获得actor配置文件演员配置文件的MATLAB表达式参数。
演员配置文件的MATLAB表达式-演员配置文件的MATLAB表达式
结构(“ClassID”0“长度”,4.7,“宽度”,1.8,“高度”,1.4,“OriginOffset”,[-1.35,0,0])(默认)| MATLAB结构| MATLAB结构数组|有效MATLAB表达式
参与者配置文件的MATLAB表达式,指定为MATLAB结构、MATLAB结构数组或产生此类结构或结构数组的有效MATLAB表达式。
如果你的场景的读者块从drivingScenario对象,若要直接从该对象获取参与者概要文件,请将该表达式设置为调用actorProfiles函数作用于对象。例如:actorProfiles(场景).
例子:结构(“ClassID”5“长度”,5.0,“宽度”,2,“高度”,2、“OriginOffset”,[-1.55,0,0])
依赖关系
要启用该参数,请设置选择方法以指定参与者概要文件参数MATLAB的表情.
角色的唯一标识符-场景定义的角色标识符
[](默认)|正整数| length-l唯一正整数的向量
场景定义的参与者标识符,指定为正整数或长度l唯一正整数的向量。l必须等于输入的演员数量演员输入端口。vector元素必须匹配ActorID演员的价值观。您可以指定角色的唯一标识符作为[].在本例中,相同的参与者配置文件参数应用于所有参与者。
例子:[1,2]
依赖关系
要启用该参数,请设置选择方法以指定参与者概要文件参数参数.
用户定义的整数来分类Actors-用户自定义分类标识符
0(默认)| integer | length-l向量的整数
用户定义的分类标识符,指定为整数或长度-l向量的整数。当角色的唯一标识符是一个向量,这个参数是一个长度相同的向量与元素一一对应角色的唯一标识符.当角色的唯一标识符是空的,[],则必须将此参数指定为单个整数,该整数的值适用于所有参与者。
例子:2
依赖关系
要启用该参数,请设置选择方法以指定参与者概要文件参数参数.
行动者长方体长度(m)-长方体的长度
4.7(默认)|正实标量|长度-l正值矢量
长方体的长度,指定为正实标量或长度-l正的向量。当角色的唯一标识符是一个向量,这个参数是一个长度相同的向量与元素一一对应角色的唯一标识符.当角色的唯一标识符是空的,[],必须将此参数指定为正实标量,其值适用于所有参与者。单位是米。
例子:6.3
依赖关系
要启用该参数,请设置选择方法以指定参与者概要文件参数参数.
行动者长方体宽度(m)-长方体的宽度
4.7(默认)|正实标量|长度-l正值矢量
长方体的宽度,指定为正实标量或长度l正的向量。当角色的唯一标识符是一个向量,这个参数是一个长度相同的向量与元素一一对应角色的唯一标识符.当角色的唯一标识符是空的,[],必须将此参数指定为正实标量,其值适用于所有参与者。单位是米。
例子:4.7
依赖关系
要启用该参数,请设置选择方法以指定参与者概要文件参数参数.
行动者长方体高(m)-长方体的高度
4.7(默认)|正实标量|长度-l正值矢量
长方体的高度,指定为正实标量或长度l正的向量。当角色的唯一标识符是一个向量,这个参数是一个长度相同的向量与元素一一对应角色的唯一标识符.当角色的唯一标识符是空的,[],必须将此参数指定为正实标量,其值适用于所有参与者。单位是米。
例子:2.0
依赖关系
要启用该参数,请设置选择方法以指定参与者概要文件参数参数.
从下中心(m)到行动者转动中心-演员的旋转中心
{[-1.35,0,0]}(默认)|长度-l实值1 × 3向量的单元数组
作用器的旋转中心,指定为长度-l实值1 × 3向量的单元数组。每个向量表示行动者的旋转中心与行动者底部中心的偏移量。对于车辆,偏移量对应于后轴中心下方地面上的点。当角色的唯一标识符是向量吗,这个参数是向量的单元格数组单元格与角色的唯一标识符.当角色的唯一标识符是空的,[],您必须将此参数指定为一个元素的单元数组,其中包含偏移量载体,其值适用于所有Actor。单位是米。
例子:[-1.35, .2, .3]
依赖关系
要启用该参数,请设置选择方法以指定参与者概要文件参数参数.
相机intrinsic
焦距(像素)-相机焦距
[800800](默认)|二元实值向量
相机焦距,以像素为单位,指定为二元实值向量。看到也FocalLength的属性cameraIntrinsics.
例子:[480320]
相机光学中心(像素)-摄像机光学中心
[320240](默认)|二元实值向量
相机的光学中心,以像素为单位,指定为双元素真实值矢量。看到也PrincipalPoint的属性cameraIntrinsics.
例子:[480320]
相机产生的图像大小(像素)- 摄像机产生的图像尺寸
[480640](默认)|两个正整数的元素向量
由相机产生的图像大小,以像素为单位,指定为正整数的二元向量。看到也图象尺寸的属性cameraIntrinsics.
例子:[240320]
径向畸变系数-径向畸变系数
(0,0)(默认)|二元实值向量|三元实值向量
径向畸变系数,指定为二元或三元实值向量。有关设置这些系数的详细信息,请参见RadialDistortion的属性cameraIntrinsics.
例子:[1]
切向畸变系数- 切向失真系数
(0,0)(默认)|二元实值向量
切向失真系数,指定为二元实值向量。有关设置这些系数的详细信息,请参见TangentialDistortion的属性cameraIntrinsics.
例子:[1]
相机轴的倾斜-摄像机轴的倾斜角度
0(默认)|实标量
摄像机轴的倾斜角度,指定为实标量。看到也斜的属性cameraIntrinsics.
例子:0.1
模型的例子



扩展功能
C / C ++代码生成
使用Simulink®Coder™生成C和c++代码。万博1manbetx
对于独立部署,视觉检测发电机块只支持万博1manbetx万博1manbetx仿真软件实时™目标。
matlab命令
你点击一个链接对应于这个MATLAB命令:
在MATLAB命令窗口中输入它来运行命令。Web浏览器不支持MATLAB命令。万博1manbetx
你也可以从以下列表中选择一个网站:
如何获得最佳的网站性能
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
