PID控制器
连续时间和离散PID控制器
- 库:
万博1manbetx模型/连续
描述
的PID控制器块实现了PID控制器(PID,π,PD, P,或者我只)。块相同离散PID控制器块的时间域参数设置为连续时间。
块的输出是输入信号的加权和,输入信号的积分,输入信号的导数。权重的比例、积分和微分增益参数。一个一阶导数行动极过滤器。
块支持多个控制器类型万博1manbetx和结构。块的可配置选项包括:
控制器类型(PID、π,PD, P,或者我只)——看到控制器参数。
控制器(并行或理想)——看到形式形式参数。
时间域(连续或离散)——看到时间域参数。
初始条件和重置触发——看到源和外部复位参数。
输出饱和限制和内置anti-windup机制——看到限制输出参数。
信号跟踪无扰控制传输和多回路的控制——看到启用跟踪模式参数。
当你改变这些选项,物体内部结构的变化通过激活不同的变体子系统。(见不同的子系统)。检查物体的内部结构及其变体子系统,右键单击,选择面具>看下面具。
PID增益调优
PID控制器系数可调的手动或自动。自动调谐需要万博1manbetx®控制设计™软件。关于自动调谐的更多信息,请参阅选择优化方法参数。
港口
输入
Port_1 (u)——误差信号输入
标量|向量
不同参考信号和控制系统的输出,如图所示。

当误差信号是一个矢量,块分别作用于每一个信号,vectorizing PID系数和生产一个向量输出信号相同的维度。您可以指定的PID系数和其他一些参数向量相同的维数作为输入信号。这样做相当于指定一个单独的PID控制器在输入信号为每一个条目。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
P——比例增益
标量|向量
比例增益,提供从外部来源。外部输入是有用的,例如,当你想映射不同的PID参数的PID增益。您还可以使用外部获得输入来实现gain-scheduled PID控制。gain-scheduled控制,你确定PID系数由逻辑或其他计算模型中,并将它们提供给块。
依赖关系
要启用这个端口,设置控制器参数的来源来外部。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
我——积分获得
标量|向量
积分增益,提供从外部来源。外部输入是有用的,例如,当你想映射不同的PID参数的PID增益。您还可以使用外部获得输入来实现gain-scheduled PID控制。gain-scheduled控制,你确定PID系数由逻辑或其他计算模型中,并将它们提供给块。
当你获得外部供应,时间积分增益的变化也集成。这个结果是因为PID增益的方式实现的。详情,请参阅控制器参数的来源参数。
依赖关系
要启用这个端口,设置控制器参数的来源来外部,并设置控制器积分作用的控制器类型。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
D——微分增益
标量|向量
微分增益,提供从外部来源。外部输入是有用的,例如,当你想映射不同的PID参数的PID增益。您还可以使用外部获得输入来实现gain-scheduled PID控制。gain-scheduled控制,你确定PID系数由逻辑或其他计算模型中,并将它们提供给块。
当你获得外部供应,时间微分增益的变化也有区别。这个结果是因为PID增益的方式实现的。详情,请参阅控制器参数的来源参数。
依赖关系
要启用这个端口,设置控制器参数的来源来外部,并设置控制器一个控制器类型微分作用。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
N——滤波器系数
标量|向量
微分滤波器系数,提供从外部来源。外部输入系数是有用的,例如,当你想映射不同的PID参数的PID增益。您还可以使用外部输入来实现gain-scheduled PID控制。gain-scheduled控制,你确定PID系数由逻辑或其他计算模型中,并将它们提供给块。
依赖关系
要启用这个端口,设置控制器参数的来源来外部,并设置控制器控制器类型过滤的导数。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
重置——外部重置触发
标量
触发复位积分器和过滤器的初始条件。的值外部复位参数确定重置发生在一个上升的信号,信号下降,或水平的信号。港口图标显示选中的触发类型。例如,下图显示了连续时间PID块外部复位设置为不断上升的。
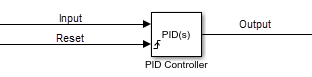
触发发生时,块重置积分器和过滤指定的初始条件积分器初始条件和过滤器初始条件参数或我0和D0港口。
请注意
是符合汽车工业软件可靠性协会(MISRA®)软件标准,您的模型必须使用布尔信号驱动的外部复位端口PID控制器块。
依赖关系
要启用这个端口,设置外部复位以外的任何值没有一个。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点|布尔
我0——积分器初始条件
标量|向量
积分器初始条件,提供了从外部来源。
依赖关系
要启用这个端口,设置初始条件的来源来外部,并设置控制器积分作用的控制器类型。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
D0——过滤器初始条件
标量|向量
提供的初始条件导数过滤器,从外部来源。
依赖关系
要启用这个端口,设置初始条件的来源来外部,并设置控制器一个控制器类型微分作用。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
向上——输出饱和上限
标量|向量
上限的块输出,提供从外部来源。如果加权和的比例、积分和微分动作超过提供的价值在这个港口,块的输出值举行。
依赖关系
要启用这个端口,选择限制输出并设置输出饱和源来外部。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
罗——输出饱和下限
标量|向量
下限的块输出,提供从外部来源。如果加权和的比例、积分和微分动作会提供以下值在这个港口,块的输出值举行。
依赖关系
要启用这个端口,选择限制输出并设置输出饱和源来外部。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
TR-跟踪信号
标量|向量
信号输出跟踪控制器。当信号跟踪活动,跟踪信号之间的差异和块输出反馈到积分器的输入。跟踪有用信号实现无扰控制传输系统,在两个控制器之间进行切换。也可以有助于防止块结束在多回路的控制系统。有关更多信息,请参见启用跟踪模式参数。
依赖关系
要启用这个端口,选择启用跟踪模式参数。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64|不动点
T贸易工业部——Discrete-integrator时间
标量
Discrete-integrator时间,提供一个标量。您可以使用自己的离散值积分器样本时间定义的速率块是在仿真软件或外部硬件上运行。万博1manbetx离散时间积分器的价值时间应与外部中断的平均采样率,当块内部使用conditionally-executed子系统。
换句话说,您可以指定Ts下面的积分器的方法对于任何这样的平均采样率值匹配外部中断。在离散时间导数项控制器的传递函数是:
在哪里α(z)取决于你积分器的方法指定这个参数。
-
向前欧拉 -
-
向后欧拉 -
-
梯形 -
关于离散集成的更多信息,见离散时间积分器块引用页面。有条件地执行子系统的更多信息,请参阅有条件地执行子系统概述。
依赖关系
要启用这个端口,设置时间域来离散时间并选择PID控制器是在一个有条件地执行子系统选择。
数据类型:单|双|int8|int16|int32|int64|uint8|uint16|uint32|uint64
输出
参数
控制器——控制器类型
PID(默认)|π|PD|P|我
指定的比例、积分和微分项的控制器。
-
PID -
比例、积分和微分作用。
-
π -
比例和积分作用。
-
PD -
比例和微分作用。
-
P -
比例作用。
-
我 -
积分作用。
提示
控制器传递函数显示在当前设置补偿器的公式下节块的参数和面具。
编程使用
块参数:控制器 |
| 类型:字符串,特征向量 |
价值观:“PID”,“π”,“PD”,“P”,“我” |
默认值:“PID” |
形式——控制器结构
平行(默认)|理想的
指定控制器结构平行或理想。
-
平行 -
控制器输出的总和的比例,积分,和衍生品的行为,独立加权P,我,D,分别。例如,对于连续时间平行形式PID控制器传递函数是:
对于一个离散时间平行形式控制器,传递函数是:
在哪里积分器的方法和过滤方法参数确定α(z),β(z),分别。
-
理想的 -
比例增益P作用于行为的总和。例如,对于连续时间理想形式PID控制器传递函数是:
离散时间的理想形式控制器,传递函数是:
在哪里积分器的方法和过滤方法参数确定一个(z),b(z),分别。
提示
控制器传递函数显示在当前设置补偿器的公式下节块的参数和面具。
编程使用
块参数:控制器 |
| 类型:字符串,特征向量 |
价值观:“平行”,“理想” |
默认值:“平行” |
时间域——指定连续时间和离散时间控制器
连续时间(默认)|离散时间
当您选择离散时间,建议您指定一个显式的样品时间。看到样品时间继承(1)参数。选择离散时间也使积分器的方法,过滤方法参数。
当PID控制器块模型同步状态控制(参见国家控制(高密度脂蛋白编码器)块),你不能选择连续时间。
请注意
的PID控制器和离散PID控制器块是相同的除了这个参数的默认值。
编程使用
块参数:TimeDomain |
| 类型:字符串,特征向量 |
价值观:“连续时间”,“离散” |
默认值:“连续时间” |
PID控制器是在一个有条件地执行子系统——使discrete-integrator时间端口
从(默认)|在
对离散PID控制器,使离散时间积分器端口使用自己的离散时间积分器样品时间的价值。确保适当的集成使用T贸易工业部港口提供Δt标量值的准确的离散时间集成。
依赖关系
要启用该参数,设置时间域来离散时间。
编程使用
块参数:UseExternalTs |
| 类型:字符串,特征向量 |
价值观:“上”,“关闭” |
默认值:“关闭” |
样品时间继承(1)——离散样本之间的时间间隔
1(默认)|积极的标量
指定一个样本的时间进入一个积极的标量值,如0.1。默认的离散采样时间为1意味着阻止继承采样时间上游块。然而,建议您显式地设置控制器样品时间,特别是如果你希望上游块的样品时间改变。控制器的影响系数P, I, D,和N取决于样品的时间。因此,对于一个给定的一组系数值,样品时间变化改变控制器的性能。
看到指定样品时间为更多的信息。
实现连续时间控制器,集时间域来连续时间。
提示
如果你想跑的块外部样本或变量指定的时间,将这个参数设置为1,把一块触发子系统。然后,在所需的样品时间触发子系统。
依赖关系
要启用该参数,设置时间域来离散时间。
编程使用
块参数:SampleTime |
| 类型:标量 |
价值观:1、积极的标量 |
默认值:1 |
积分器的方法——计算积分的方法在离散时间控制器
向前欧拉(默认)|向后欧拉|梯形
在离散时间,积分项控制器的传递函数Iα(z),α(z)取决于你积分器的方法指定这个参数。
-
向前欧拉 -
矩形(左)近似,
这种方法最适合小的采样时间,奈奎斯特极限很大的带宽相比控制器。对于较大的采样时间,
向前欧拉方法会导致不稳定,即使离散化连续时间系统,该系统是稳定的。 -
向后欧拉 -
落后的矩形(右)近似,
的一个优势
向后欧拉方法是离散化稳定的连续时间系统使用这种方法总是产生一个稳定的离散时间的结果。 -
梯形 -
双线性近似,
的一个优势
梯形方法是离散化稳定的连续时间系统使用这种方法总是产生一个稳定的离散时间的结果。所有可用的集成方法,梯形方法之间的收益率最接近的匹配离散系统的频域特性和相应的连续时间系统。提示
控制器的公式显示在当前设置补偿器的公式下节块的参数和面具。
请注意
为BackwardEuler或梯形方法,你不能生成HDL代码块如果:
限制输出选择和Anti-Windup方法是任何其他比
没有一个。启用跟踪模式被选中。
关于离散集成的更多信息,见离散时间积分器块引用页面。
依赖关系
要启用该参数,设置时间域来离散时间并设置控制器一个控制器和积分作用类型。
编程使用
块参数:IntegratorMethod |
| 类型:字符串,特征向量 |
价值观:“向前欧拉”,“向后欧拉”,“梯形” |
默认值:“向前欧拉” |
过滤方法——计算导数方法在离散时间控制器
向前欧拉(默认)|向后欧拉|梯形
在离散时间导数项控制器的传递函数是:
在哪里α(z)取决于过滤方法你用这个参数指定。
-
向前欧拉 -
矩形(左)近似,
这种方法最适合小的采样时间,奈奎斯特极限很大的带宽相比控制器。对于较大的采样时间,
向前欧拉方法会导致不稳定,即使离散化连续时间系统,该系统是稳定的。 -
向后欧拉 -
落后的矩形(右)近似,
的一个优势
向后欧拉方法是离散化稳定的连续时间系统使用这种方法总是产生一个稳定的离散时间的结果。 -
梯形 -
双线性近似,
的一个优势
梯形方法是离散化稳定的连续时间系统使用这种方法总是产生一个稳定的离散时间的结果。所有可用的集成方法,梯形方法之间的收益率最接近的匹配离散系统的频域特性和相应的连续时间系统。提示
控制器的公式显示在当前设置补偿器的公式下节块的参数和面具。
关于离散集成的更多信息,见离散时间积分器块引用页面。
依赖关系
要启用该参数,设置时间域来离散时间并使使用过滤导数。
编程使用
块参数:FilterMethod |
| 类型:字符串,特征向量 |
价值观:“向前欧拉”,“向后欧拉”,“梯形” |
默认值:“向前欧拉” |
主要
源——源控制器和滤波器系数
内部(默认)|外部
使外部输入的参数允许你计算PID收益和外部滤波器系数块,并提供他们的信号输入。
-
内部 -
使用块指定控制器增益和滤波器系数的参数P,我,D,N。
-
外部 -
指定PID收益和外部使用块输入滤波器系数。一个额外的输入端口出现在块的每个参数所需的电流控制器类型。
外部输入是有用的,例如,当你想映射不同的PID参数的PID增益。您还可以使用外部获得输入来实现gain-scheduled PID控制。gain-scheduled控制时,你确定PID获得逻辑或其他计算模型中,并将它们提供给块。
当你获得外部供应,时间积分和微分增益值的变化是整合和分化,分别。这个结果是因为在两个连续时间和离散时间,之前的成果应用于信号集成或分化。例如,对于一个连续时间PID控制器与外部输入,积分器的术语被实现为下图所示。

块内,输入信号u乘以集成商提供的外部收益,我之前,集成。这个实现的收益率:
因此,积分器得到包含在积分。类似地,在物体的导数项,微分增益先于乘法的分化,使微分增益D是有区别的。

编程使用
块参数:ControllerParametersSource |
| 类型:字符串,特征向量 |
价值观:“内部”,“外部” |
默认值:“内部” |
比例(P)——比例增益
1(默认)|标量|向量
指定一个有限的,真正的增益值比例增益。当控制器形式是:
平行——比例作用独立于积分和导数的行动。例如,对于一个连续时间并行PID控制器,传递函数是:对于一个离散时间平行形式控制器,传递函数是:
在哪里积分器的方法和过滤方法参数确定α(z),β(z),分别。
理想的——比例增益倍数积分和导数项。例如,对于一个连续时间理想PID控制器,传递函数是:离散时间的理想形式控制器,传递函数是:
在哪里积分器的方法和过滤方法参数确定α(z),β(z),分别。
可调:是的
依赖关系
要启用该参数,主要选项卡,设置控制器参数源来内部并设置控制器来PID,PD,π,或P。
编程使用
块参数:P |
| 类型:标量、矢量 |
| 默认值:1 |
积分(I)——积分获得
1(默认)|标量|向量
指定一个有限的,真正的增益值积分增益。
可调:是的
依赖关系
要启用该参数,主要选项卡,设置控制器参数源来内部,并设置控制器一个积分作用的类型。
编程使用
块参数:我 |
| 类型:标量、矢量 |
| 默认值:1 |
微分(D)——微分增益
0(默认)|标量|向量
指定一个有限的,真正的增益值导数增益。
可调:是的
依赖关系
要启用该参数,主要选项卡,设置控制器参数源来内部,并设置控制器来PID或PD。
编程使用
块参数:D |
| 类型:标量、矢量 |
| 默认值:0 |
使用过滤导数——过滤器适用于衍生品项
在(默认)|从
离散PID控制器,明确这一选项来代替过滤的过滤导数离散微分电路。当你这样做的时候,控制器传递函数的导数项就变成:
PID控制器,对连续时间导数项总是过滤。
依赖关系
要启用该参数,设置时间域来离散时间,并设置控制器一个微分作用的类型。
编程使用
块参数:UseFilter |
| 类型:字符串,特征向量 |
价值观:“上”,“关闭” |
默认值:“上” |
滤波器系数(N)——微分滤波器系数
100(默认)|标量|向量
指定一个有限的,真正的增益值滤波器系数。滤波器系数决定了滤波器的极点位置的微分作用。滤波器极点的位置取决于时间域参数。
当时间域是
连续时间杆的位置s = n。当时间域是
离散时间,极点位置取决于过滤方法参数。过滤方法 滤波器极点的位置 向前欧拉向后欧拉梯形
不支持万博1manbetxN =正(理想的未经过滤的导数)。当时间域是离散时间,你可以清晰的使用过滤导数删除导数过滤器。
可调:是的
依赖关系
要启用该参数,主要选项卡,设置控制器参数源来内部并设置控制器来PID或PD。
编程使用
块参数:N |
| 类型:标量、矢量 |
| 默认值:One hundred. |
选择优化方法——工具自动调优控制器系数
基于传递函数(PID调节器应用)(默认)|基于频率响应
如果你有万博1manbetx仿真软件控制设计软件,可以自动调整PID系数。为此,使用该参数选择一个优化工具,然后单击调优。
-
基于传递函数(PID调节器应用) -
使用PID调谐器,它可以让你交互地调整PID系数在检查相关的系统响应验证性能。默认情况下,PID调谐器与植物的线性化模型。对于不能线性化的模型,您可以调整PID系数对植物从模拟模型估计或测量响应数据。有关更多信息,请参见介绍了基于模型的PID优化模型万博1manbetx(万博1manbetx仿真软件控制设计)。
-
基于频率响应 -
使用基于频率响应的PID调节器,这曲调PID控制器系数基于频率特性仿真获得的估计数据。这种优化方法特别有用的植物不linearizable或线性化为零。有关更多信息,请参见从植物频率特性数据设计PID控制器(万博1manbetx仿真软件控制设计)。
这两种优化方法假设单回路控制配置。万博1manbetx仿真软件控制设计软件包括其他调优方法,适合更复杂的配置。对于其他方法来调整信息PID控制器块,看选择一个控制设计方法(万博1manbetx仿真软件控制设计)。
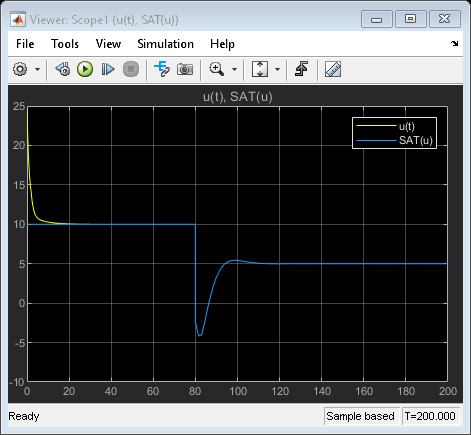
使讨论二阶导数过零检测——零交叉检测复位和进入或离开一个饱和状态
在(默认)|从
讨论二阶导数过零检测可以准确定位信号不连续而不诉诸过度小时间步会导致仿真时间太长。如果您选择限制输出或激活外部复位在PID控制器,激活零交点检测模拟可以减少计算时间。选择该参数激活零交点检测:
在初始状态重置
当进入一个上层或更低的饱和状态
当离开一个上层或更低的饱和状态
讨论二阶导数过零检测的更多信息,请参阅讨论二阶导数过零检测。
编程使用
块参数:ZeroCross |
| 类型:字符串,特征向量 |
价值观:“上”,“关闭” |
默认值:“上” |
初始化
源——来源积分器和导数的初始条件
内部(默认)|外部
万博1manbetx仿真软件使用初始条件初始化积分器和derivative-filter(或未经过滤的导数)输出的模拟或在指定的触发事件。(见外部复位参数)。这些初始条件确定初始块输出。使用这个参数选择如何提供初始条件值。
-
内部 -
指定初始条件使用积分器初始条件和过滤器初始条件参数。如果使用过滤导数不是选择,使用微分电路参数指定的初始条件过滤微分器代替一个过滤器初始条件。
-
外部 -
使用块指定初始条件外部输入。额外的输入端口我o和Do出现在块中。如果使用过滤导数不是选择,提供过滤的初始条件的区别在哪里Do而不是一个过滤器初始条件。
编程使用
块参数:InitialConditionSource |
| 类型:字符串,特征向量 |
价值观:“内部”,“外部” |
默认值:“内部” |
积分器——积分器初始条件
0(默认)|标量|向量
万博1manbetx仿真软件使用积分器初始条件初始化积分器的模拟或在指定的触发事件(见外部复位)。积分器初始条件和过滤器初始条件确定的初始输出PID控制器块。
积分器初始条件不能南或正。
依赖关系
使用这个参数,初始化选项卡,设置源来内部,并设置控制器一个积分作用的类型。
编程使用
块参数:InitialConditionForIntegrator |
| 类型:标量、矢量 |
| 默认值:0 |
过滤器——过滤器初始条件
0(默认)|标量|向量
万博1manbetx仿真软件使用滤波器初始条件初始化微分滤波器的仿真或在指定的触发事件(见外部复位)。积分器初始条件和过滤器初始条件确定的初始输出PID控制器块。
过滤器初始条件不能南或正。
依赖关系
使用这个参数,初始化选项卡,设置源来内部,并使用一个控制器,导数过滤器。
编程使用
块参数:InitialConditionForFilter |
| 类型:标量、矢量 |
| 默认值:0 |
微分电路——初始条件过滤的导数
0(默认)|标量|向量
当您使用一个未经过滤的导数,仿真软件使用这些参数来初始化微分电路的模拟或在指定万博1manbetx的触发事件(见外部复位)。积分器初始条件和初始条件导数确定初始的输出PID控制器块。
导数初始条件不能南或正。
依赖关系
使用这个参数,设置时间域来离散时间、清晰的使用过滤导数复选框,初始化选项卡,设置源来内部。
编程使用
块参数:DifferentiatorICPrevScaledInput |
| 类型:标量、矢量 |
| 默认值:0 |
初始条件设置——位置的初始条件
状态(最有效)(默认)|输出
使用这个参数指定是否应用积分器初始条件和过滤器初始条件参数对应的块状态或输出。您可以更改该参数在命令行中,使用set_param设置InitialConditionSetting块的参数。
-
状态(最有效) -
使用这个选项在所有情况下除非块在触发子系统或函数调用子系统和简化初始化模式启用。
-
输出 -
块时使用这个选项在触发子系统或函数调用子系统和简化初始化模式启用。
更多的信息初始条件设置参数,请参阅离散时间积分器块。
这个参数只能通过编程使用。
编程使用
块参数:InitialConditionSetting |
| 类型:字符串,特征向量 |
价值观:“状态”,“输出” |
默认值:“状态” |
外部复位——触发复位积分器和过滤值
没有一个(默认)|不断上升的|下降|要么|水平
指定触发条件,导致块复位积分器和过滤器初始条件。(如果使用过滤导数不是选择,触发器重置积分器和微分器初始条件)。除了选择任何选项没有一个使重置港口的块外部复位信号。
-
没有一个 -
积分器和过滤器(或微分器)输出设置为初始条件的模拟,在模拟而不是重置。
-
不断上升的 -
重置时输出复位信号的前沿。
-
下降 -
重置时输出复位信号的下降沿。
-
要么 -
重置时输出复位信号上升或下降。
-
水平 -
重置时输出复位信号:
在当前时间步是零吗
从零变化之前的时间在当前时间一步一步为零
这个选项的输出非零初始条件而复位信号。
依赖关系
要启用该参数,设置控制器一种微分或积分作用。
编程使用
块参数:ExternalReset |
| 类型:字符串,特征向量 |
价值观:“没有”,“上升”,“下降”,“不是”,“水平” |
默认值:“没有” |
忽略重置时线性化——强制线性化忽略重置
从(默认)|在
力模型和选择万博1manbetx万博1manbetx仿真软件控制设计线性化命令忽略任何重置机制中指定外部复位参数。忽略重置状态允许一个操作点附近的线性化模型即使这导致块复位操作点。
编程使用
块参数:IgnoreLimit |
| 类型:字符串,特征向量 |
价值观:“关闭”,“上” |
默认值:“关闭” |
启用跟踪模式——激活信号跟踪
从(默认)|在
信号跟踪让块输出遵循你提供一个跟踪信号TR端口。当信号跟踪活动,跟踪信号之间的差异和块的输出反馈增益的积分器的输入Kt指定的,跟踪获得(Kt)参数。信号跟踪有多个应用程序,包括无扰控制转移,避免终结在多回路的控制结构。
无扰控制转移
使用信号跟踪实现无扰控制传输系统,在两个控制器之间进行切换。假设您想之间转移控制的PID控制器,另一个控制器。为此,连接控制器输出TR输入下图所示。
![]()
有关更多信息,请参见无扰控制转移。
多回路的控制
使用信号跟踪防止块结尾的多回路的控制方法,如以下模型。

内循环子系统包含块下图所示。

由于PID控制器跟踪内部循环的输出,其输出不超过饱和内循环的输出。更多细节,请参阅防止多回路的控制块结束。
依赖关系
要启用该参数,设置控制器一个积分作用的类型。
编程使用
块参数:TrackingMode |
| 类型:字符串,特征向量 |
价值观:“关闭”,“上” |
默认值:“关闭” |
跟踪系数(Kt)——获得信号跟踪反馈循环
1(默认)|标量
当您选择启用跟踪模式,信号之间的差异TR和块输出反馈到积分器输入增益Kt。使用这个参数指定增益的反馈循环。
依赖关系
要启用该参数,选择启用跟踪模式。
编程使用
块参数:Kt |
| 类型:标量 |
| 默认值:1 |
输出饱和
限制输出——限制块输出到指定的饱和值
从(默认)|在
激活此选项限制块的输出,所以你不需要一个单独的饱和块后控制器。它还允许您激活anti-windup机制构建块(见Anti-windup方法参数)。指定输出饱和限制使用下限和上限参数。您还可以指定块的饱和限制外部输入端口。
编程使用
块参数:LimitOutput |
| 类型:字符串,特征向量 |
价值观:“关闭”,“上” |
默认值:“关闭” |
源——源输出饱和限制
内部(默认)|外部
使用这个参数来指定如何供应块的上部和更低的饱和限制输出。
-
内部 -
指定输出饱和限制使用上限和下限参数。
-
外部 -
指定输出饱和限制外部使用块输入端口。额外的输入端口向上和罗出现在块中。您可以使用输入端口实现上下输出饱和限制由逻辑或其他计算仿真软件模型和传递到块中。万博1manbetx
编程使用
块参数:SatLimitsSource |
| 类型:字符串,特征向量 |
价值观:“内部”,“外部” |
默认值:“内部” |
上限——块输出饱和上限
正(默认)|标量
指定块输出的上限。块的输出是举行的饱和上限每当加权和的比例、积分和微分动作超过这个值。
依赖关系
要启用该参数,选择限制输出。
编程使用
块参数:UpperSaturationLimit |
| 类型:标量 |
默认值:正 |
下限——块输出饱和下限
负(默认)|标量
指定块的下限输出。块的输出是举行的低饱和限制每当加权和的比例、积分和微分动作会低于这个值。
依赖关系
要启用该参数,选择限制输出。
编程使用
块参数:LowerSaturationLimit |
| 类型:标量 |
默认值:负 |
忽略饱和时,线性化——强制线性化忽略输出限制
从(默认)|在
力模型和万博1manbetx万博1manbetx仿真软件控制设计忽略块输出线性化命令中指定的限制上限和下限参数。忽略输出限制允许一个操作点附近的线性化模型,即使操作点导致块超过限制的输出。
依赖关系
要启用该参数,选择限制输出参数。
编程使用
块参数:LinearizeAsGain |
| 类型:字符串,特征向量 |
价值观:“关闭”,“上” |
默认值:“关闭” |
Anti-windup方法- ii anti-windup方法
没有一个(默认)|反演计算|夹紧
当您选择限制输出和控制器的加权和组件超过指定的输出限制,块的输出保存在指定的限制。然而,积分器的输出可以继续增长(integrator终结),增加块输出之间的差异和块组件的总和。换句话说,可以无限的内部信号块即使出现受饱和约束限制的输出。没有一种机制来防止积分器终结,可能有两个结果:
如果输入信号的符号没有变化,积分器持续集成,直到溢出。溢值最大值或最小值的数据类型积分器的输出。
如果输入信号的符号改变一旦加权和已经不再输出的限制,它可以需要很长时间才能解除积分器和返回块内的加权和饱和极限。
在这两种情况下,控制器性能会受到影响。打击结束没有anti-windup机制的影响,可能需要降低控制器(例如,通过减少控制器的收益),导致缓慢的控制器。为了避免这个问题,激活一个anti-windup机制使用这个参数。
-
没有一个 -
不要使用一个anti-windup机制。
-
反演计算 -
解除块时积分器的输出反馈使饱和的积分器饱和和不饱和控制信号之间的区别。下图表示一个连续时间的反演计算反馈电路控制器。看到实际的反馈电路,控制器配置中,右键单击并选择面具>看下面具。

使用反演计算系数(Kb)参数指定anti-windup反馈电路的增益。它通常是令人满意的
Kb =我与微分作用或控制器,我* D Kb =√)。反算法可以有效的对植物相对大的死时间[1]。 -
夹紧 -
集成停止当块组件的总和超过输入输出限制和积分器的输出和块具有相同的信号。集成简历当块组件的总和超过输出限制和积分器的输出和输入块相反的迹象。夹紧有时被称为有条件的集成。
夹紧可以用于植物相对较小的死亡时间,但可以产生一个贫穷的瞬态响应大死[1]。

依赖关系
要启用该参数,选择限制输出参数。
编程使用
块参数:AntiWindupMode |
| 类型:字符串,特征向量 |
价值观:“没有”,“回算”,“夹紧” |
默认值:“没有” |
反演计算系数(Kb)——anti-windup反馈回路的增益系数
1(默认)|标量
的反演计算anti-windup方法展开积分器当块输出饱和烃。它通过反馈积分器饱和和不饱和控制信号之间的区别。使用反演计算系数(Kb)参数指定anti-windup反馈电路的增益。有关更多信息,请参见Anti-windup方法参数。
依赖关系
要启用该参数,选择限制输出参数,并设置Anti-windup方法参数反演计算。
编程使用
块参数:Kb |
| 类型:标量 |
| 默认值:1 |
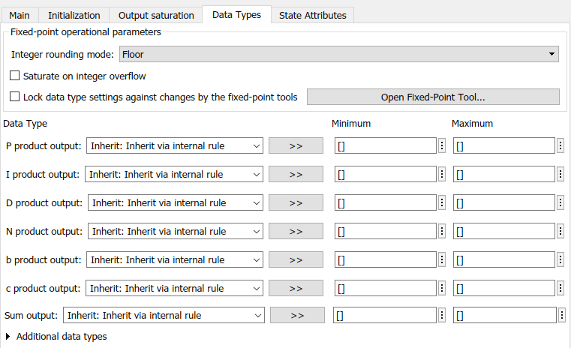
数据类型
使用的参数在此选项卡主要是定点使用定点设计师™代码生成。他们定义与块相关联的数字量是如何存储和处理当你生成代码。
如果您需要为定点代码生成配置数据类型,点击开放定点工具并使用这个工具来配置参数的选项卡。使用定点工具的信息,请参阅自动定量数据对象使用定点工具(定点设计师)。
在使用定点工具之后,您可以使用此选项卡中的参数在必要时做出调整定点数据类型设置。对于每个与块相关联的数量,您可以指定:
浮点和定点数据类型,包括数据类型是否继承自上游块中的值。
的最小和最大数量的值,确定定点表示法的数量比例。
协助选择适当的值,点击![]() 打开数据类型相应数量的助理。有关更多信息,请参见使用数据类型指定数据类型的助理。
打开数据类型相应数量的助理。有关更多信息,请参见使用数据类型指定数据类型的助理。
特定的数据类型选项卡中列出的数量取决于你如何配置PID控制器。一般来说,您可以配置以下类型的数量的数据类型:
产品输出——商店乘法的结果块面具下进行。例如,P产品输出商店获得的输出块繁殖块输入成比例增加P。
参数-商店一块数字参数的值,例如P,我,或D。
块输出,存储的输出块驻留在PID控制器块面具。例如,使用积分器的输出指定的数据类型块称为积分器的输出。这个街区里的面具下的积分器子系统,并计算积分器控制器动作的词。
蓄电池——存储值和块。例如,SumI2蓄电池集的数据类型蓄电池与块SumI2求和。这个街区驻留在面具后面的计算Anti-Windup子系统的子系统。
一般来说,你可以找到任何上市相关的块参数下通过PID控制器块面具和检查它的子系统。您还可以使用Model Explorer搜索参数名称列出的面具下,等SumI2。(见模型浏览器)。
匹配的输入和内部数据类型
默认情况下,所有数据类型的块将继承:继承通过内部规则。这个设置,仿真软件选择数据类型来平衡数万博1manbetx值精度,性能,和生成的代码大小,而占嵌入式目标硬件的特性。
在一些情况下,在块之间会发生不兼容的数据类型。例如,在连续时间,面具下的积分器块只能接受信号的类型双。如果块输入信号是不能转换成一个类型双,如uint16,内部类型继承规则生成代码时产生一个错误。
为了避免这种错误,您可以使用数据类型设置强制数据类型转换。例如,您可以显式地设置P产品输出,我的产品输出,D产品输出来双,确保信号的连续系统集成商的类型双。
在一般情况下,不建议使用代码生成应用程序块在连续时间。然而,类似的数据类型错误可以发生在离散时间,如果您显式地设置一些值的数据类型不兼容的下游信号中约束。在这种情况下,使用的数据类型设置,以确保所有内部数据类型兼容。
定点操作参数整数舍入模式——定点操作的舍入模式
地板上(默认)|天花板|收敛|最近的|轮|简单的|零
指定定点运算的舍入模式。有关更多信息,请参见舍入(定点设计师)。
块参数都调整到最近的价值。控制块的舍入参数,输入一个表达式使用MATLAB®舍入函数的面具。
编程使用
块参数:RndMeth |
| 类型:特征向量 |
价值观:“天花板”|“收敛”|“地板”|“最近”|“圆”|“简单”|“零” |
默认值:“地板” |
浸透在整数溢出——溢出行动的方法
从(默认)|在
指定是否溢出饱和或包装。
从——溢出包装到适当的数据类型可以表示的值。例如,130号不适合在-126年签署了8位整数和包装。
在——溢出的最小值或最大值,数据类型可以表示。例如,一个溢出与一个签署了8位整数可以浸透到-128或127年。
提示
考虑选择这个复选框当你的模型有一个可能的溢出和你想要显式饱和保护在生成的代码中。
考虑清除此复选框当你想优化生成的代码的效率。
清除此复选框也能帮助你避免overspecifying一块如何处理超出范围的信号。有关更多信息,请参见解决信号范围错误。
选中此复选框时,饱和适用于每个内部操作,不仅输出或结果。
在一般情况下,代码生成过程可以发现当溢出是不可能的。在这种情况下,代码生成器不能产生饱和代码。
编程使用
块参数:SaturateOnIntegerOverflow |
| 类型:特征向量 |
价值观:”从“|”“ |
默认值:“关闭” |
锁对变化的数据类型设置定点工具——防止定点工具最重要的数据类型
从(默认)|在
选择这个参数来防止定点工具覆盖您所指定的数据类型在这个块。有关更多信息,请参见锁输出数据类型设置(定点设计师)。
编程使用
块参数:LockScale |
| 类型:特征向量 |
价值观:”从“|”“ |
默认值:“关闭” |
状态属性
这个标签的参数主要是用于代码生成。
国家名称(例如,“位置”)为连续时间滤波器和积分器状态——名称
”(默认)|特征向量
分配一个唯一的名称与积分器相关国家或过滤器,为连续时间PID控制器。(国家名称在离散PID控制器的信息,看到了国家的名字参数)。使用国家名称,例如:
在生成的代码对应的变量
作为存储名称的一部分,当仿真过程中日志状态
线性模型中相应的国家获得的线性化
一个有效的状态名称始于一个字母或下划线字符,字母数字或下划线字符。
依赖关系
要启用该参数,设置时间域来连续时间。
编程使用
参数:IntegratorContinuousStateAttributes,FilterContinuousStateAttributes |
| 类型:特征向量 |
默认值:” |
国家的名字——名称离散滤波器和积分器状态
空字符串(默认)| |字符字符串向量
分配一个唯一的名称与积分器相关国家或过滤器,对离散PID控制器。(国家名称在连续时间PID控制器的信息,看到了国家名称(例如,“位置”)参数)。
一个有效的状态名称始于一个字母或下划线字符,字母数字或下划线字符。使用国家名称,例如:
在生成的代码对应的变量
作为存储名称的一部分,当仿真过程中日志状态
线性模型中相应的国家获得的线性化
更多的信息在代码生成中使用国家名称,明白了界面元素C代码生成配置模型(万博1manbetx仿真软件编码器)。
依赖关系
要启用该参数,设置时间域来离散时间。
编程使用
参数:IntegratorStateIdentifier,FilterStateIdentifier |
| 类型:字符串,特征向量 |
默认值:”“ |
国家名称必须解决信号模型对象万博1manbetx——要求国家名称解析为一个信号对象
从(默认)|在
选择该参数要求离散时间积分器或过滤状态名称解析为一个仿真软件信号对象。万博1manbetx
依赖关系
启用该参数的离散时间积分器或过滤器状态:
集时间域来
离散时间。指定一个值的积分器或过滤器国家的名字。
设置模型配置参数信号的分辨率以外的一个值
没有一个。
选择此复选框禁用代码生成存储类相应的积分器或过滤状态。
编程使用
块参数:IntegratorStateMustResolveToSignalObject,FilterStateMustResolveToSignalObject |
| 类型:字符串,特征向量 |
价值观:“关闭”,“上” |
默认值:“关闭” |
代码生成存储类——存储类代码生成
汽车(默认)|ExportedGlobal|ImportedExtern|ImportedExternPointer
选择状态存储类代码生成。如果你不需要外部代码界面,选择汽车。
有关更多信息,请参见界面元素C代码生成配置模型(万博1manbetx仿真软件编码器)和参数数据组织成一个结构通过使用结构体存储类(嵌入式编码)。
依赖关系
启用该参数的离散时间积分器或过滤器状态:
集时间域来
离散时间。指定一个值的积分器或过滤器国家的名字。
设置模型配置参数信号的分辨率以外的一个值
没有一个。
编程使用
块参数:IntegratorRTWStateStorageClass,FilterRTWStateStorageClass |
| 类型:字符串,特征向量 |
价值观:“汽车”,“ExportedGlobal”,“ImportedExtern”|“ImportedExternPointer” |
默认值:“汽车” |
代码生成存储类型限定符——存储类型限定符
空字符串(默认)| |特征向量“常量”|“不稳定”|……
指定一个存储类型限定符等常量或挥发性。
请注意
在将来的版本中这个参数将被删除。应用数据存储类型限定符,使用自定义存储类和记忆的部分。除非你使用一个ERT-based代码生成目标嵌入式编码器®、自定义存储类和内存部分不影响生成的代码。
依赖关系
要启用该参数,设置代码生成存储类以外的任何值汽车。
编程使用
块参数:IntegratorRTWStateStorageTypeQualifier,FilterRTWStateStorageTypeQualifier |
| 类型:字符串,特征向量 |
价值观:”“,“常量”,“不稳定” |
默认值:”“ |
块特征
数据类型 |
|
直接引线 |
|
多维信号 |
|
适应信号 |
|
讨论二阶导数过零检测 |
|
兼容性的考虑
引用
[1]Visioli,。,"Modified Anti-Windup Scheme for PID Controllers,"IEE程序,控制理论和应用程序第一卷。150年,2003年1月