Navigation and Mapping
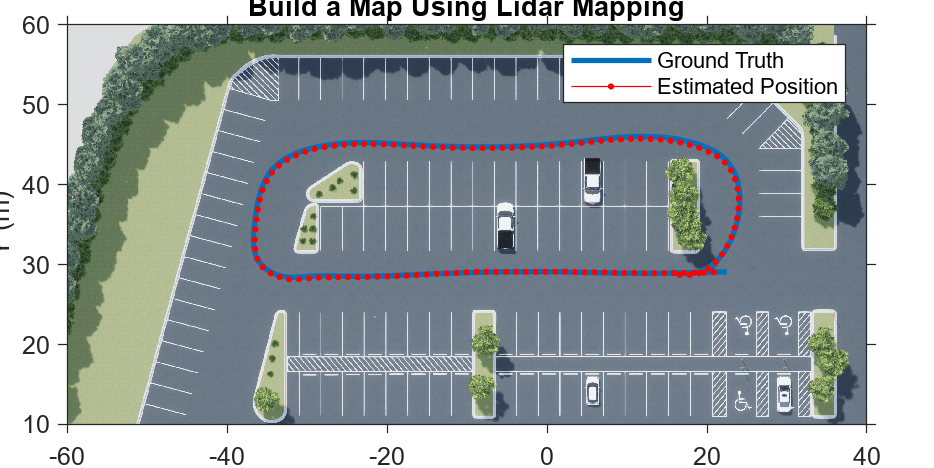
A key component for advanced driver assistance systems (ADAS) applications and autonomous robots is enabling awareness of where the vehicle or robot is, with respect to its surroundings and using this information to estimate the best path to its destination. The simultaneous localization and mapping (SLAM) process uses algorithms to estimate the pose of a vehicle and the map of the environment at the same time.
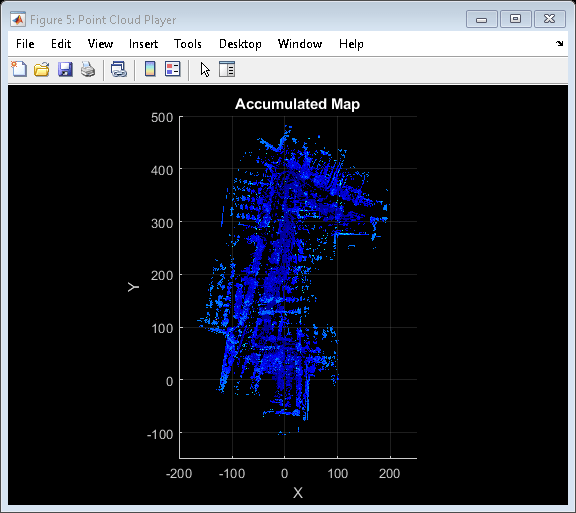
激光雷达的工具箱™ provides a point cloud registration workflow that uses the fast point feature histogram (FPFH) algorithm to stitch together point cloud sequences. You can use this feature for progressive map building. Such a map can facilitate path planning for vehicle navigation or can be used for SLAM. For an example of how to use theextractFPFHFeaturesfunction in a 3-D SLAM workflow for aerial data, seeAerial Lidar SLAM Using FPFH Descriptors.
激光雷达的工具箱also provides features for scan matching and simulating range-bearing sensor readings. These features are used in 2-D SLAM and obstacle detection workflows
Functions
Topics
- Implement Point Cloud SLAM in MATLAB
Understand point cloud registration and mapping workflow.
- Estimate Transformation Between Two Point Clouds Using Features
This example shows how to estimate a rigid transformation between two point clouds.
- Match and Visualize Corresponding Features in Point Clouds
This example shows how to match corresponding features between point clouds using the
pcmatchfeaturesfunction and visualize them using thepcshowMatchedFeaturesfunction.
Featured Examples




You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)